 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLR-GAM: Contrastive Point Cloud Learning with Guided Augmentation and Feature Mapping
Paper and Code
Feb 28, 2023

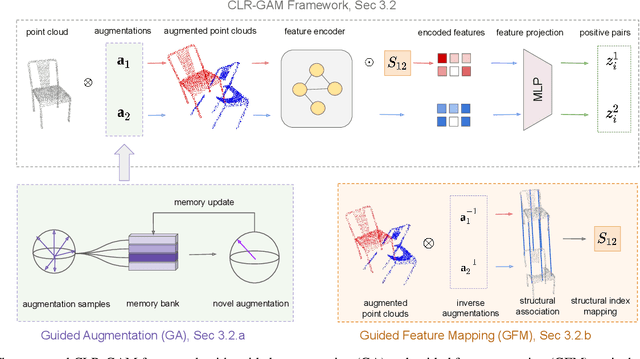

Point cloud data plays an essential role in robotics and self-driving applications. Yet, annotating point cloud data is time-consuming and nontrivial while they enable learning discriminative 3D representations that empower downstream tasks, such as classification and segmentation. Recently, contrastive learning-based frameworks have shown promising results for learning 3D representations in a self-supervised manner. However, existing contrastive learning methods cannot precisely encode and associate structural features and search the higher dimensional augmentation space efficiently. In this paper, we present CLR-GAM, a novel contrastive learning-based framework with Guided Augmentation (GA) for efficient dynamic exploration strategy and Guided Feature Mapping (GFM) for similar structural feature association between augmented point clouds. We empirically demonstrate that the proposed approach achieves state-of-the-art performance on both simulated and real-world 3D point cloud datasets for three different downstream tasks, i.e., 3D point cloud classification, few-shot learning, and object part segmentation.