 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-Chain Manipulation of Large Objects by Multi-Arm Robotic Systems
Paper and Code
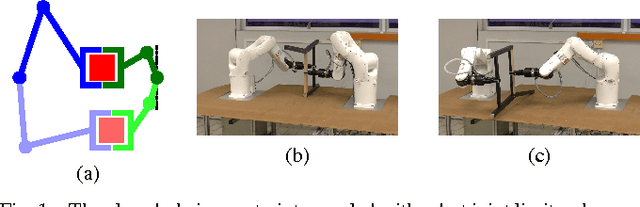
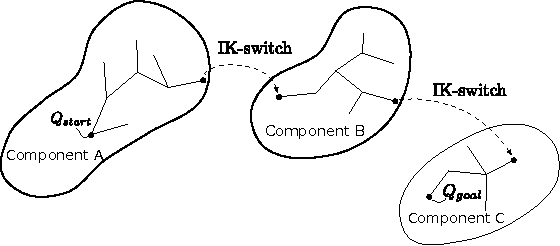
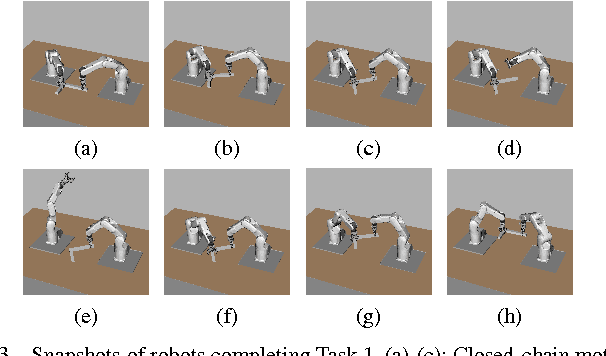
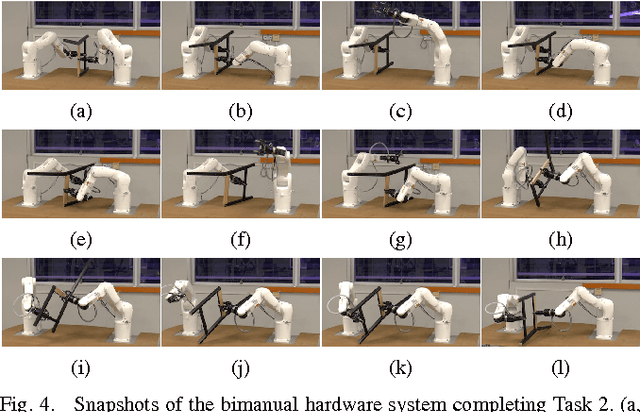
Closed kinematic chains are created whenever multiple robot arms concurrently manipulate a single object. The closed-chain constraint, when coupled with robot joint limits, dramatically changes the connectivity of the configuration space. We propose a regrasping move, termed "IK-switch", which allows efficiently bridging components of the configuration space that are otherwise mutually disconnected. This move, combined with several other developments, such as a method to stabilize the manipulated object using the environment, a new tree structure, and a compliant control scheme, enables us to address complex closed-chain manipulation tasks, such as flipping a chair frame, which is otherwise impossible to realize using existing multi-arm planning methods.