 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLAMP: Majorized Plug-and-Play for Coherent 3D LIDAR Imaging
Paper and Code
Jun 19, 2024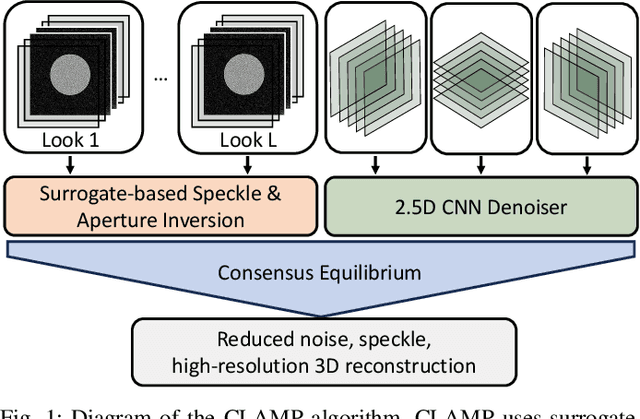
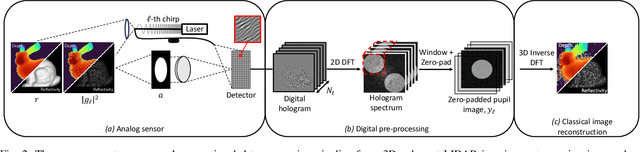
Coherent LIDAR uses a chirped laser pulse for 3D imaging of distant targets. However, existing coherent LIDAR image reconstruction methods do not account for the system's aperture, resulting in sub-optimal resolution. Moreover, these methods use majorization-minimization for computational efficiency, but do so without a theoretical treatment of convergence. In this paper, we present Coherent LIDAR Aperture Modeled Plug-and-Play (CLAMP) for multi-look coherent LIDAR image reconstruction. CLAMP uses multi-agent consensus equilibrium (a form of PnP) to combine a neural network denoiser with an accurate physics-based forward model. CLAMP introduces an FFT-based method to account for the effects of the aperture and uses majorization of the forward model for computational efficiency. We also formalize the use of majorization-minimization in consensus optimization problems and prove convergence to the exact consensus equilibrium solution. Finally, we apply CLAMP to synthetic and measured data to demonstrate its effectiveness in producing high-resolution, speckle-free, 3D imagery.