 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChoosing Smartly: Adaptive Multimodal Fusion for Object Detection in Changing Environments
Paper and Code
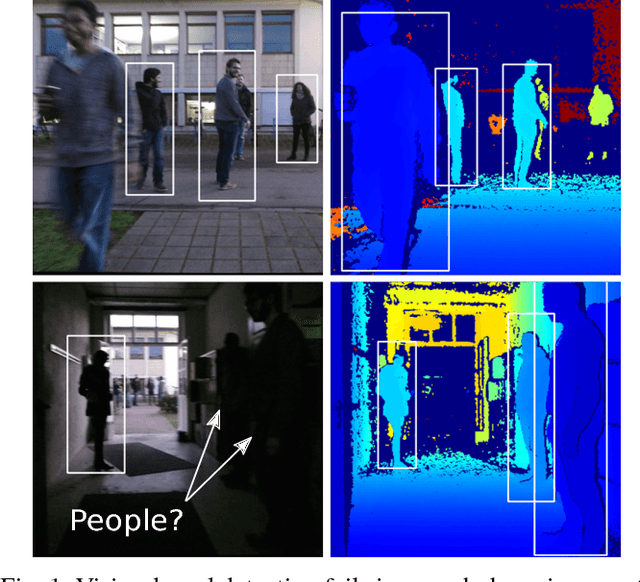
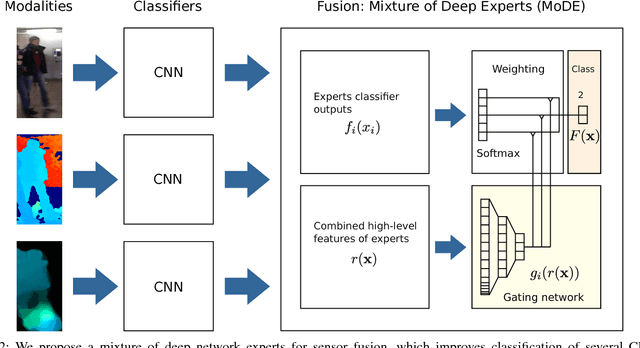
Object detection is an essential task for autonomous robots operating in dynamic and changing environments. A robot should be able to detect objects in the presence of sensor noise that can be induced by changing lighting conditions for cameras and false depth readings for range sensors, especially RGB-D cameras. To tackle these challenges, we propose a novel adaptive fusion approach for object detection that learns weighting the predictions of different sensor modalities in an online manner. Our approach is based on a mixture of convolutional neural network (CNN) experts and incorporates multiple modalities including appearance, depth and motion. We test our method in extensive robot experiments, in which we detect people in a combined indoor and outdoor scenario from RGB-D data, and we demonstrate that our method can adapt to harsh lighting changes and severe camera motion blur. Furthermore, we present a new RGB-D dataset for people detection in mixed in- and outdoor environments, recorded with a mobile robot.