 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChannel Boosting Feature Ensemble for Radar-based Object Detection
Paper and Code
Jan 10, 2021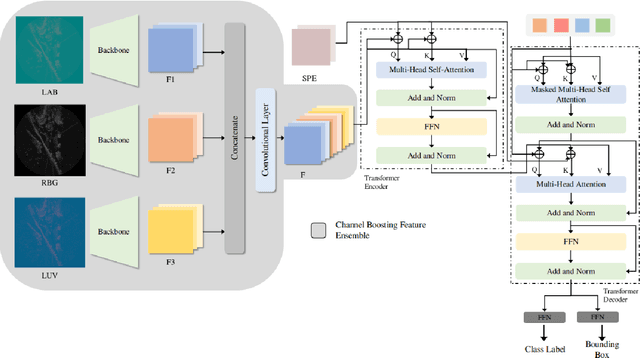
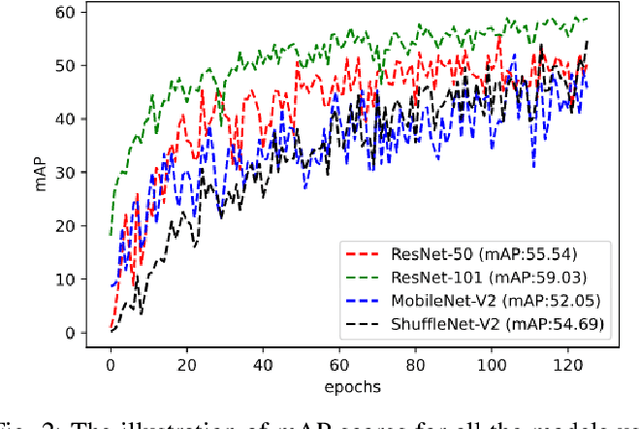
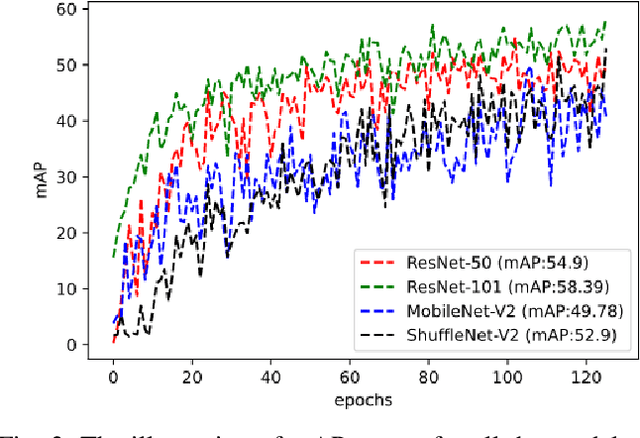
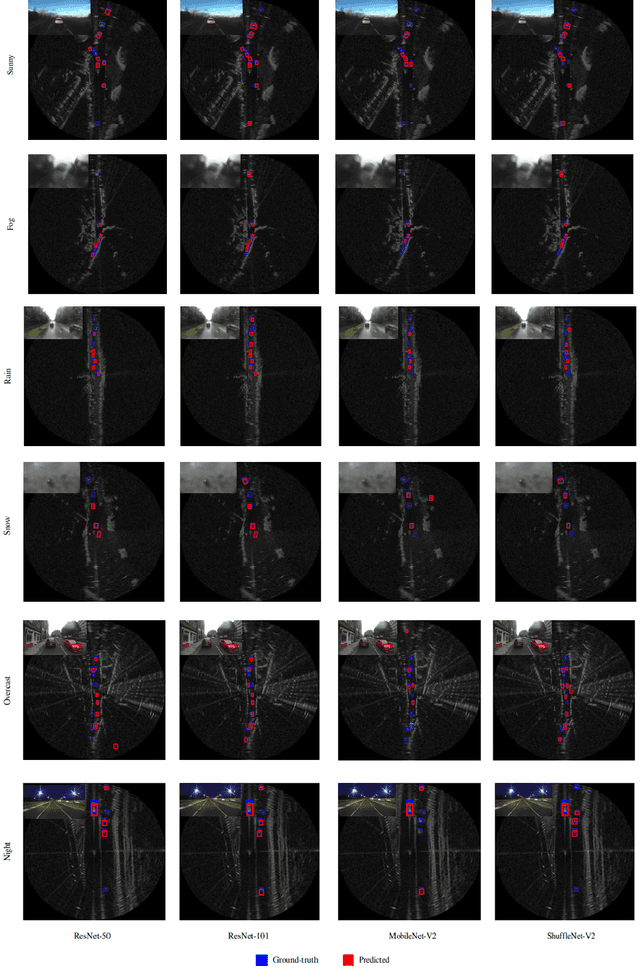
Autonomous vehicles are conceived to provide safe and secure services by validating the safety standards as indicated by SOTIF-ISO/PAS-21448 (Safety of the intended functionality). Keeping in this context, the perception of the environment plays an instrumental role in conjunction with localization, planning and control modules. As a pivotal algorithm in the perception stack, object detection provides extensive insights into the autonomous vehicle's surroundings. Camera and Lidar are extensively utilized for object detection among different sensor modalities, but these exteroceptive sensors have limitations in resolution and adverse weather conditions. In this work, radar-based object detection is explored provides a counterpart sensor modality to be deployed and used in adverse weather conditions. The radar gives complex data; for this purpose, a channel boosting feature ensemble method with transformer encoder-decoder network is proposed. The object detection task using radar is formulated as a set prediction problem and evaluated on the publicly available dataset in both good and good-bad weather conditions. The proposed method's efficacy is extensively evaluated using the COCO evaluation metric, and the best-proposed model surpasses its state-of-the-art counterpart method by $12.55\%$ and $12.48\%$ in both good and good-bad weather conditions.