 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCATNIPS: Collision Avoidance Through Neural Implicit Probabilistic Scenes
Paper and Code
Feb 24, 2023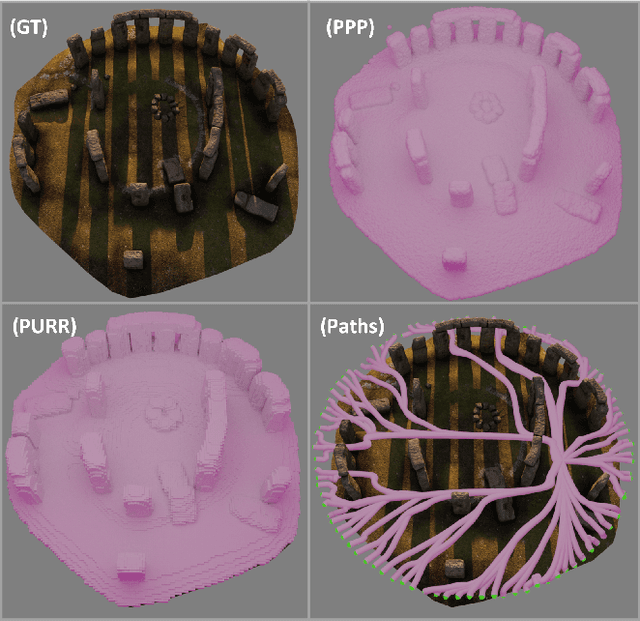
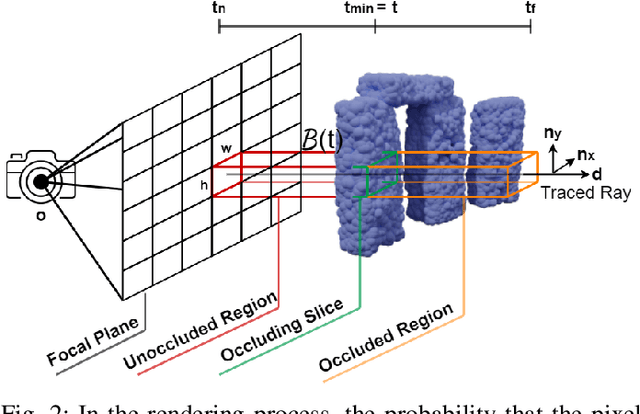
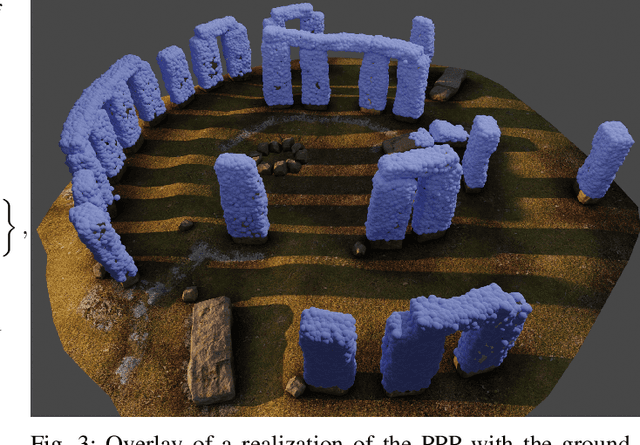
We formalize a novel interpretation of Neural Radiance Fields (NeRFs) as giving rise to a Poisson Point Process (PPP). This PPP interpretation allows for rigorous quantification of uncertainty in NeRFs, in particular, for computing collision probabilities for a robot navigating through a NeRF environment model. The PPP is a generalization of a probabilistic occupancy grid to the continuous volume and is fundamental to the volumetric ray-tracing model underlying radiance fields. Building upon this PPP model, we present a chance-constrained trajectory optimization method for safe robot navigation in NeRFs. Our method relies on a voxel representation called the Probabilistic Unsafe Robot Region (PURR) that spatially fuses the chance constraint with the NeRF model to facilitate fast trajectory optimization. We then combine a graph-based search with a spline-based trajectory optimization to yield robot trajectories through the NeRF that are guaranteed to satisfy a user-specific collision probability. We validate our chance constrained planning method through simulations, showing superior performance compared with two other methods for trajectory planning in NeRF environment models.