 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCatch Me if You Can: A Novel Task for Detection of Covert Geo-Locations
Paper and Code
Feb 05, 2022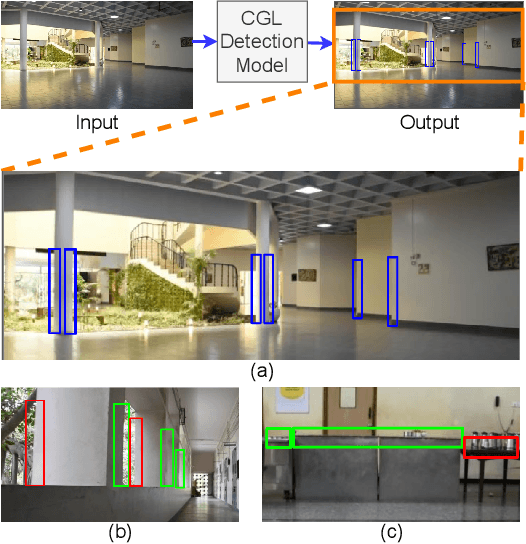
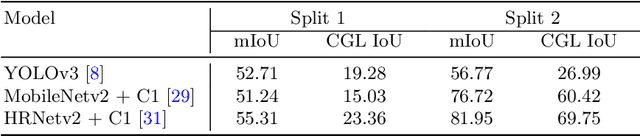
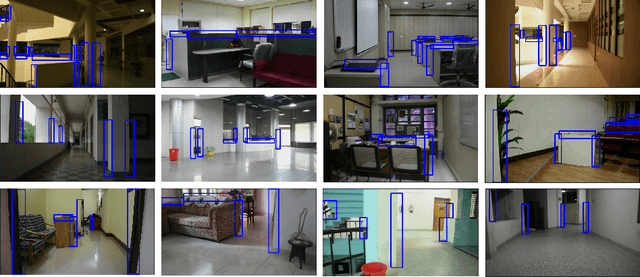

Most visual scene understanding tasks in the field of computer vision involve identification of the objects present in the scene. Image regions like hideouts, turns, & other obscured regions of the scene also contain crucial information, for specific surveillance tasks. Task proposed in this paper involves the design of an intelligent visual aid for identification of such locations in an image, which has either the potential to create an imminent threat from an adversary or appear as the target zones needing further investigation. Covert places (CGL) for hiding behind an occluding object are concealed 3D locations, not detectable from the viewpoint (camera). Hence this involves delineating specific image regions around the projections of outer boundary of the occluding objects, as places to be accessed around the potential hideouts. CGL detection finds applications in military counter-insurgency operations, surveillance with path planning for an exploratory robot. Given an RGB image, the goal is to identify all CGLs in the 2D scene. Identification of such regions would require knowledge about the 3D boundaries of obscuring items (pillars, furniture), their spatial location with respect to the neighboring regions of the scene. We propose this as a novel task, termed Covert Geo-Location (CGL) Detection. Classification of any region of an image as a CGL (as boundary sub-segments of an occluding object that conceals the hideout) requires examining the 3D relation between boundaries of occluding objects and their neighborhoods & surroundings. Our method successfully extracts relevant depth features from a single RGB image and quantitatively yields significant improvement over existing object detection and segmentation models adapted and trained for CGL detection. We also introduce a novel hand-annotated CGL detection dataset containing 1.5K real-world images for experimentation.