 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCANShield: Signal-based Intrusion Detection for Controller Area Networks
Paper and Code
May 03, 2022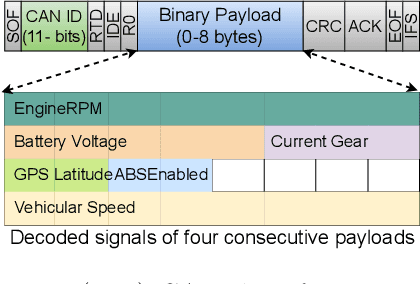

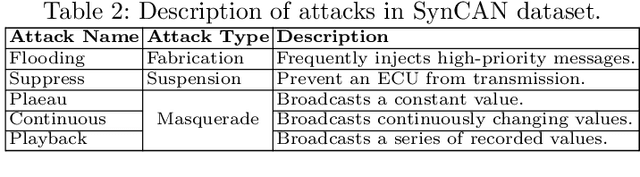
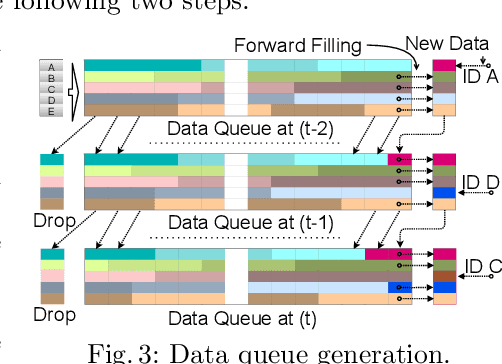
Modern vehicles rely on a fleet of electronic control units (ECUs) connected through controller area network (CAN) buses for critical vehicular control. However, with the expansion of advanced connectivity features in automobiles and the elevated risks of internal system exposure, the CAN bus is increasingly prone to intrusions and injection attacks. The ordinary injection attacks disrupt the typical timing properties of the CAN data stream, and the rule-based intrusion detection systems (IDS) can easily detect them. However, advanced attackers can inject false data to the time series sensory data (signal), while looking innocuous by the pattern/frequency of the CAN messages. Such attacks can bypass the rule-based IDS or any anomaly-based IDS built on binary payload data. To make the vehicles robust against such intelligent attacks, we propose CANShield, a signal-based intrusion detection framework for the CAN bus. CANShield consists of three modules: a data preprocessing module that handles the high-dimensional CAN data stream at the signal level and makes them suitable for a deep learning model; a data analyzer module consisting of multiple deep autoencoder (AE) networks, each analyzing the time-series data from a different temporal perspective; and finally an attack detection module that uses an ensemble method to make the final decision. Evaluation results on two high-fidelity signal-based CAN attack datasets show the high accuracy and responsiveness of CANShield in detecting wide-range of advanced intrusion attacks.