 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera Calibration through Camera Projection Loss
Paper and Code
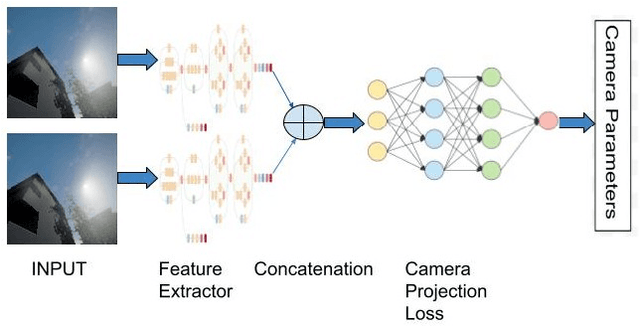

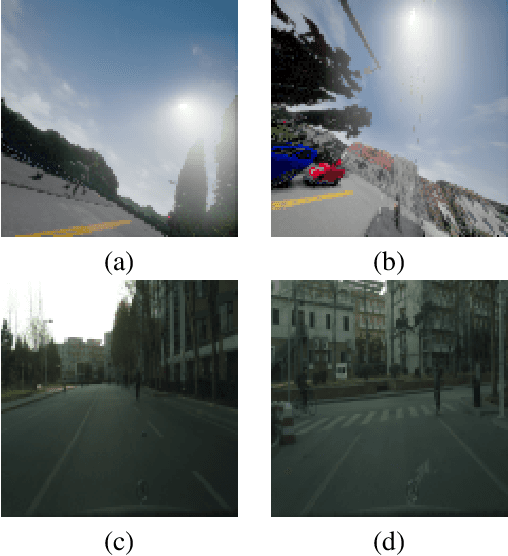

Camera calibration is a necessity in various tasks including 3D reconstruction, hand-eye coordination for a robotic interaction, autonomous driving, etc. In this work we propose a novel method to predict extrinsic (baseline, pitch, and translation), intrinsic (focal length and principal point offset) parameters using an image pair. Unlike existing methods, instead of designing an end-to-end solution, we proposed a new representation that incorporates camera model equations as a neural network in multi-task learning framework. We estimate the desired parameters via novel \emph{camera projection loss} (CPL) that uses the camera model neural network to reconstruct the 3D points and uses the reconstruction loss to estimate the camera parameters. To the best of our knowledge, ours is the first method to jointly estimate both the intrinsic and extrinsic parameters via a multi-task learning methodology that combines analytical equations in learning framework for the estimation of camera parameters. We also proposed a novel dataset using CARLA Simulator. Empirically, we demonstrate that our proposed approach achieves better performance with respect to both deep learning-based and traditional methods on 7 out of 10 parameters evaluated using both synthetic and real data. Our code and generated dataset will be made publicly available to facilitate future research.