 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibration of the internal and external parameters of wheeled robot mobile chasses and inertial measurement units based on nonlinear optimization
Paper and Code
May 17, 2020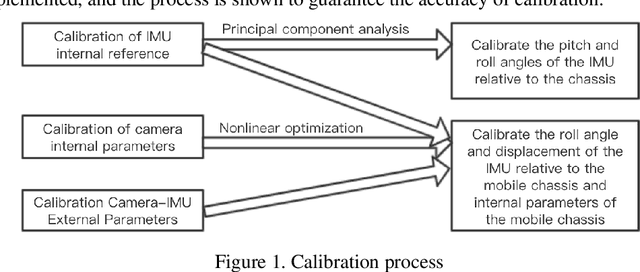
Mobile robot positioning, mapping, and navigation systems generally employ an inertial measurement unit (IMU) to obtain the acceleration and angular velocity of the robot. However, errors in the internal and external parameters of an IMU arising from defective calibration directly affect the accuracy of robot positioning and pose estimation. While this issue has been addressed by the mature internal reference calibration methods available for IMUs, external reference calibration methods between the IMU and the chassis of a mobile robot are lacking. This study addresses this issue by proposing a novel chassis-IMU internal and external parameter calibration algorithm based on nonlinear optimization, which is designed for robots equipped with cameras, IMUs, and wheel speed odometers, and functions under the premise of accurate calibrations for the internal parameters of the IMU and the internal and external parameters of the camera. All of the internal and external reference calibrations are conducted using the robot's existing equipment without the need for additional calibration aids. The feasibility of the method is verified by its application to a Mecanum wheel omnidirectional mobile platform as an example, as well as suitable for other type chassis of mobile robots. The proposed calibration method is thereby demonstrated to guarantee the accuracy of robot pose estimation.