 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAD-based robot programming: The role of Fuzzy-PI force control in unstructured environments
Paper and Code
Sep 09, 2013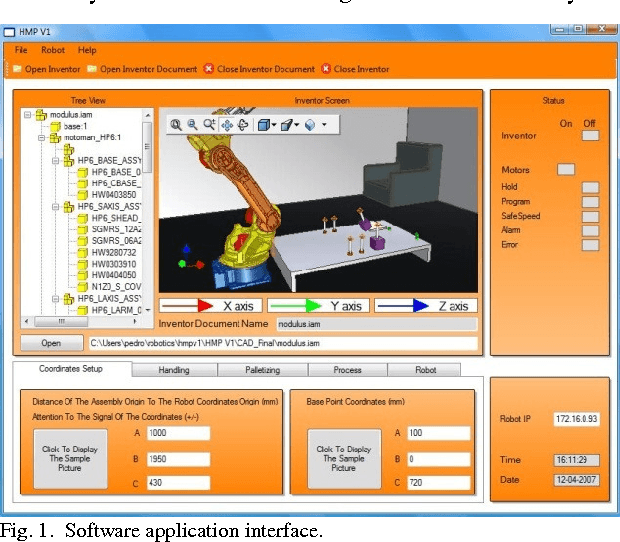
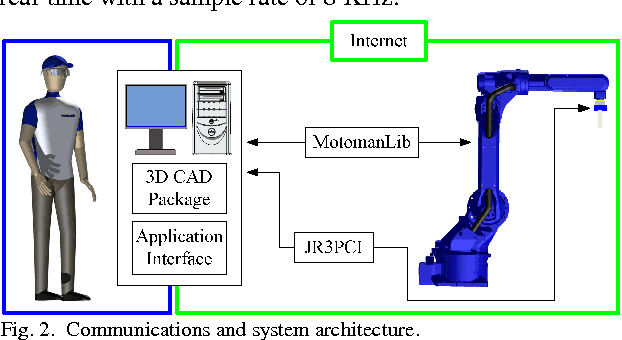
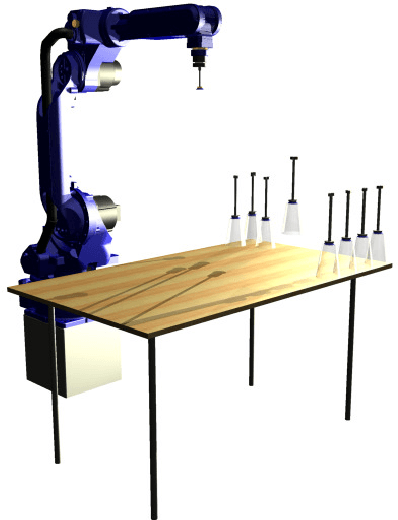
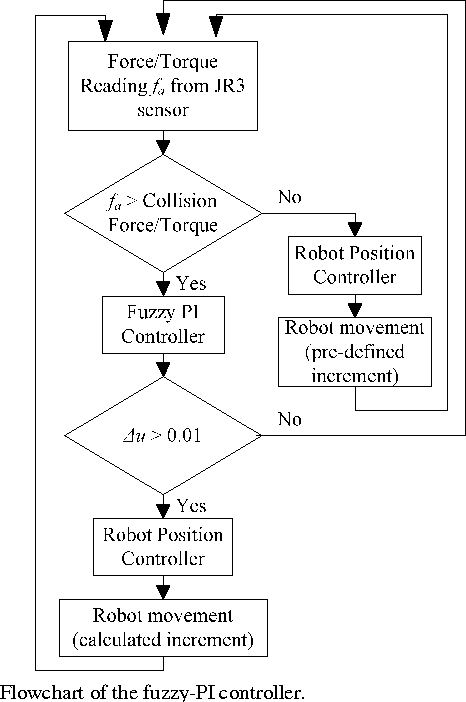
More and more, new ways of interaction between humans and robots are desired, something that allow us to program a robot in an intuitive way, quickly and with a high-level of abstraction from the robot language. In this paper is presented a CAD-based system that allows users with basic skills in CAD and without skills in robot programming to generate robot programs from a CAD model of a robotic cell. When the CAD model reproduces exactly the real scenario, the system presents a satisfactory performance. On the contrary, when the CAD model does not reproduce exactly the real scenario or the calibration process is poorly done, we are dealing with uncertain (unstructured environment). In order to minimize or eliminate the previously mentioned problems, it was introduced sensory feedback (force and torque sensing) in the robotic framework. By controlling the end-effector pose and specifying its relationship to the interaction/contact forces, robot programmers can ensure that the robot maneuvers in an unstructured environment, damping possible impacts and also increasing the tolerance to positioning errors from the calibration process. Fuzzy-PI reasoning was used as a force control technique. The effectiveness of the proposed approach was evaluated in a series of experiments.