 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Sim2Real Gap Using Image Gradients for the Task of End-to-End Autonomous Driving
Paper and Code
May 16, 2022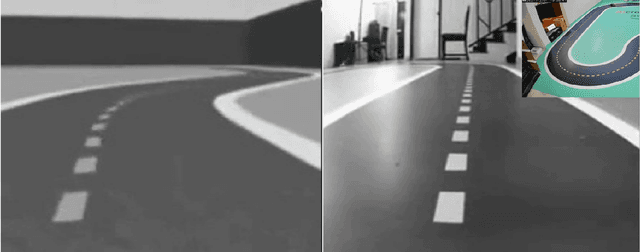
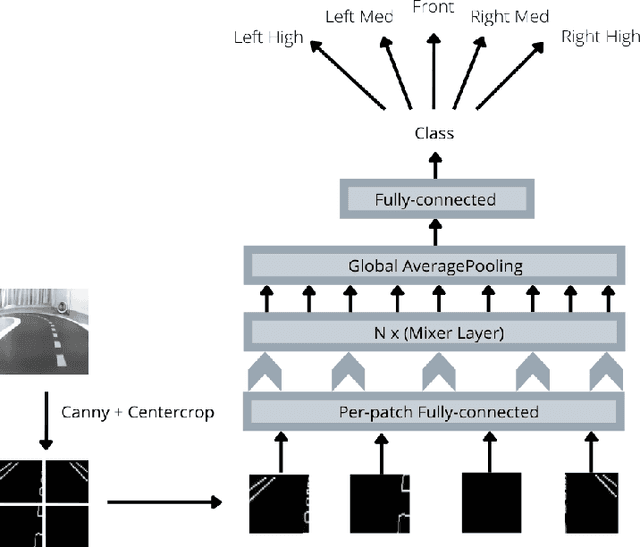
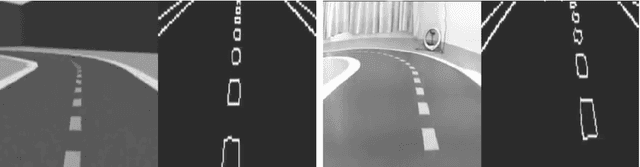
We present the first prize solution to NeurIPS 2021 - AWS Deepracer Challenge. In this competition, the task was to train a reinforcement learning agent (i.e. an autonomous car), that learns to drive by interacting with its environment, a simulated track, by taking an action in a given state to maximize the expected reward. This model was then tested on a real-world track with a miniature AWS Deepracer car. Our goal is to train a model that can complete a lap as fast as possible without going off the track. The Deepracer challenge is a part of a series of embodied intelligence competitions in the field of autonomous vehicles, called The AI Driving Olympics (AI-DO). The overall objective of the AI-DO is to provide accessible mechanisms for benchmarking progress in autonomy applied to the task of autonomous driving. The tricky section of this challenge was the sim2real transfer of the learned skills. To reduce the domain gap in the observation space we did a canny edge detection in addition to cropping out of the unnecessary background information. We modeled the problem as a behavioral cloning task and used MLP-MIXER to optimize for runtime. We made sure our model was capable of handling control noise by careful filtration of the training data and that gave us a robust model capable of completing the track even when 50% of the commands were randomly changed. The overall runtime of the model was only 2-3ms on a modern CPU.