 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBox-level Segmentation Supervised Deep Neural Networks for Accurate and Real-time Multispectral Pedestrian Detection
Paper and Code
Feb 14, 2019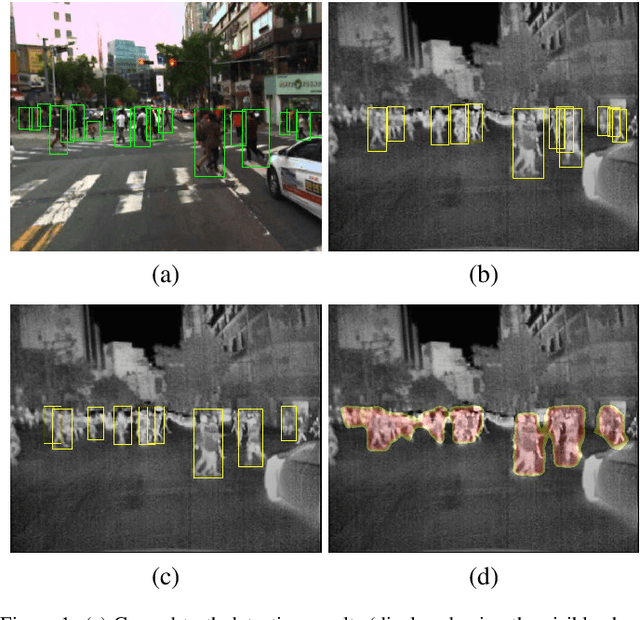



Effective fusion of complementary information captured by multi-modal sensors (visible and infrared cameras) enables robust pedestrian detection under various surveillance situations (e.g. daytime and nighttime). In this paper, we present a novel box-level segmentation supervised learning framework for accurate and real-time multispectral pedestrian detection by incorporating features extracted in visible and infrared channels. Specifically, our method takes pairs of aligned visible and infrared images with easily obtained bounding box annotations as input and estimates accurate prediction maps to highlight the existence of pedestrians. It offers two major advantages over the existing anchor box based multispectral detection methods. Firstly, it overcomes the hyperparameter setting problem occurred during the training phase of anchor box based detectors and can obtain more accurate detection results, especially for small and occluded pedestrian instances. Secondly, it is capable of generating accurate detection results using small-size input images, leading to improvement of computational efficiency for real-time autonomous driving applications. Experimental results on KAIST multispectral dataset show that our proposed method outperforms state-of-the-art approaches in terms of both accuracy and speed.