 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoundary Distribution Estimation to Precise Object Detection
Paper and Code
Nov 02, 2021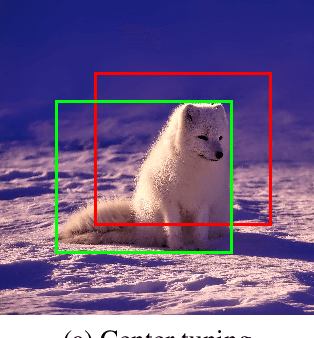
In principal modern detectors, the task of object localization is implemented by the box subnet which concentrates on bounding box regression. The box subnet customarily predicts the position of the object by regressing box center position and scaling factors. Although this approach is frequently adopted, we observe that the result of localization remains defective, which makes the performance of the detector unsatisfactory. In this paper, we prove the flaws in the previous method through theoretical analysis and experimental verification and propose a novel solution to detect objects precisely. Rather than plainly focusing on center and size, our approach refines the edges of the bounding box on previous localization results by estimating the distribution at the boundary of the object. Experimental results have shown the potentiality and generalization of our proposed method.