 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBootstrapping the Expressivity with Model-based Planning
Paper and Code
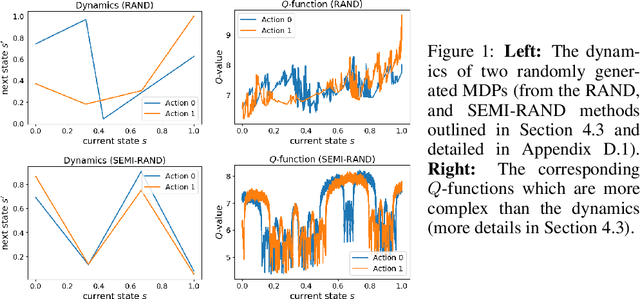
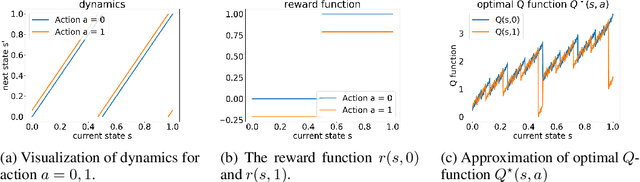
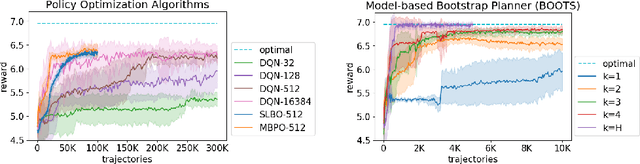
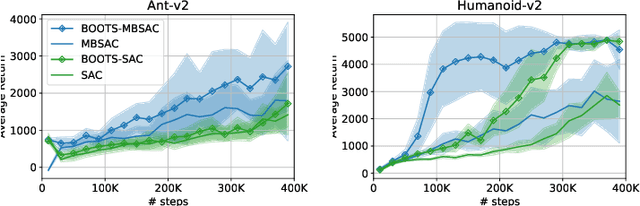
We compare the model-free reinforcement learning with the model-based approaches through the lens of the expressive power of neural networks for policies, $Q$-functions, and dynamics. We show, theoretically and empirically, that even for one-dimensional continuous state space, there are many MDPs whose optimal $Q$-functions and policies are much more complex than the dynamics. We hypothesize many real-world MDPs also have a similar property. For these MDPs, model-based planning is a favorable algorithm, because the resulting policies can approximate the optimal policy significantly better than a neural network parameterization can, and model-free or model-based policy optimization rely on policy parameterization. Motivated by the theory, we apply a simple multi-step model-based bootstrapping planner (BOOTS) to bootstrap a weak $Q$-function into a stronger policy. Empirical results show that applying BOOTS on top of model-based or model-free policy optimization algorithms at the test time improves the performance on MuJoCo benchmark tasks.