Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBootstrapping Intrinsically Motivated Learning with Human Demonstrations
Paper and Code
Dec 08, 2011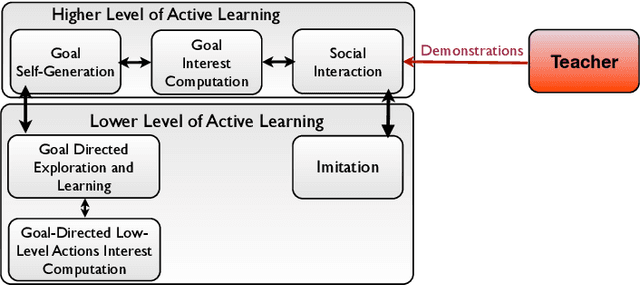
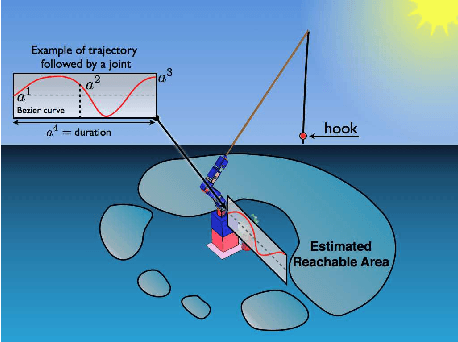
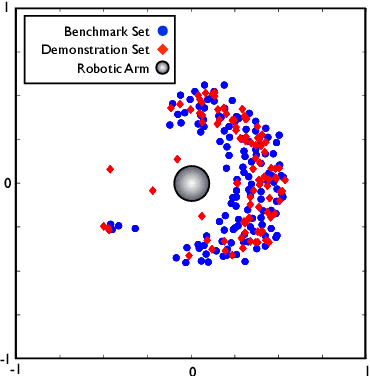
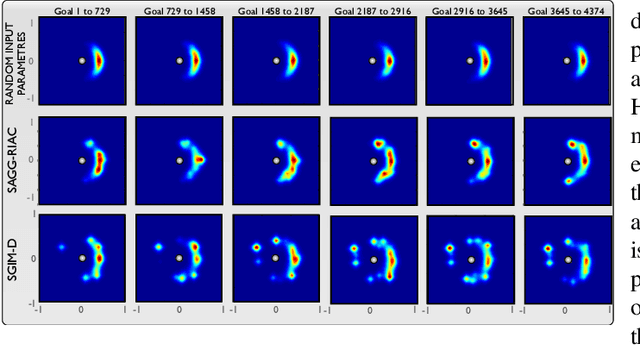
This paper studies the coupling of internally guided learning and social interaction, and more specifically the improvement owing to demonstrations of the learning by intrinsic motivation. We present Socially Guided Intrinsic Motivation by Demonstration (SGIM-D), an algorithm for learning in continuous, unbounded and non-preset environments. After introducing social learning and intrinsic motivation, we describe the design of our algorithm, before showing through a fishing experiment that SGIM-D efficiently combines the advantages of social learning and intrinsic motivation to gain a wide repertoire while being specialised in specific subspaces.
* IEEE International Conference on Development and Learning, Frankfurt
: Germany (2011)
View paper on