 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBootstrap Your Own Correspondences
Paper and Code
Jun 01, 2021


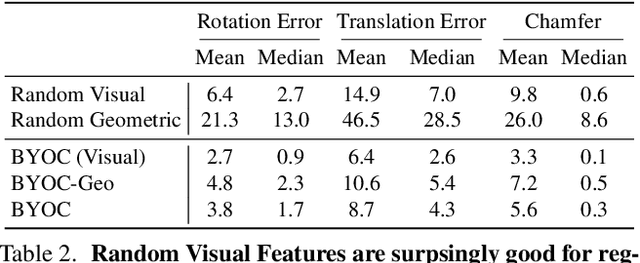
Geometric feature extraction is a crucial component of point cloud registration pipelines. Recent work has demonstrated how supervised learning can be leveraged to learn better and more compact 3D features. However, those approaches' reliance on ground-truth annotation limits their scalability. We propose BYOC: a self-supervised approach that learns visual and geometric features from RGB-D video without relying on ground-truth pose or correspondence. Our key observation is that randomly-initialized CNNs readily provide us with good correspondences; allowing us to bootstrap the learning of both visual and geometric features. Our approach combines classic ideas from point cloud registration with more recent representation learning approaches. We evaluate our approach on indoor scene datasets and find that our method outperforms traditional and learned descriptors, while being competitive with current state-of-the-art supervised approaches.