 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlur Robust Optical Flow using Motion Channel
Paper and Code
Mar 07, 2016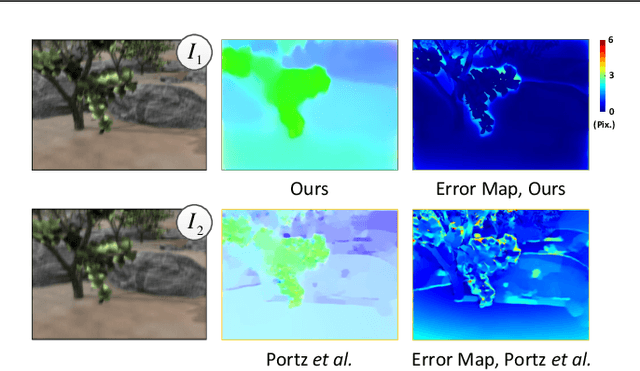
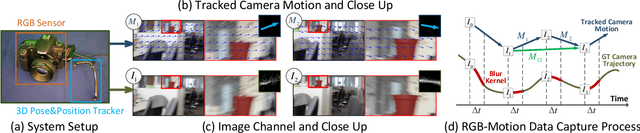

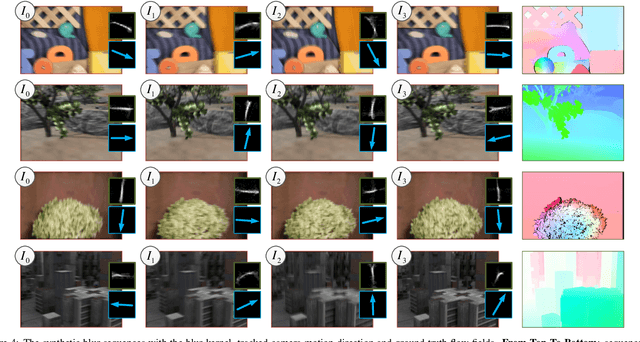
It is hard to estimate optical flow given a realworld video sequence with camera shake and other motion blur. In this paper, we first investigate the blur parameterization for video footage using near linear motion elements. we then combine a commercial 3D pose sensor with an RGB camera, in order to film video footage of interest together with the camera motion. We illustrates that this additional camera motion/trajectory channel can be embedded into a hybrid framework by interleaving an iterative blind deconvolution and warping based optical flow scheme. Our method yields improved accuracy within three other state-of-the-art baselines given our proposed ground truth blurry sequences; and several other realworld sequences filmed by our imaging system.