 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlock-wise Lensless Compressive Camera
Paper and Code
Jan 19, 2017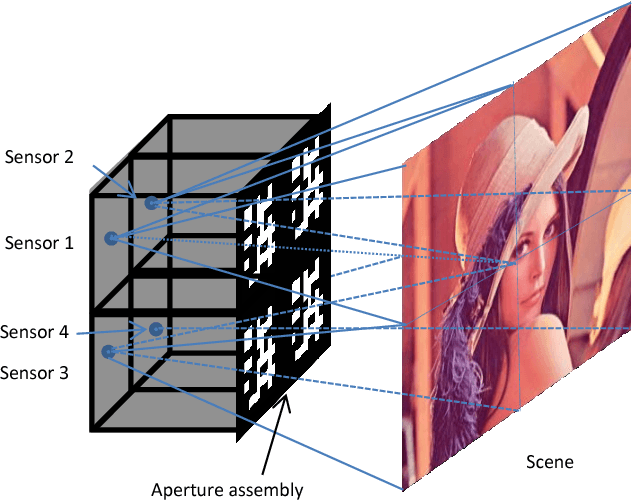
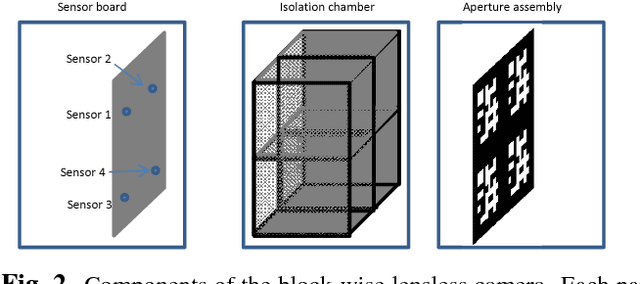
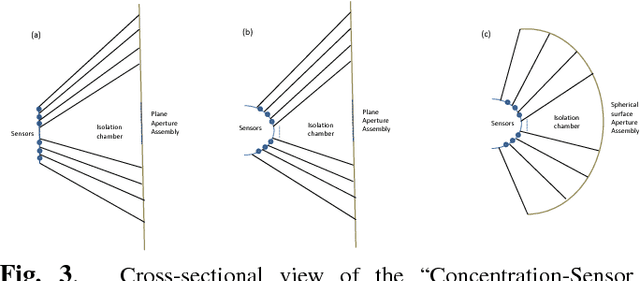
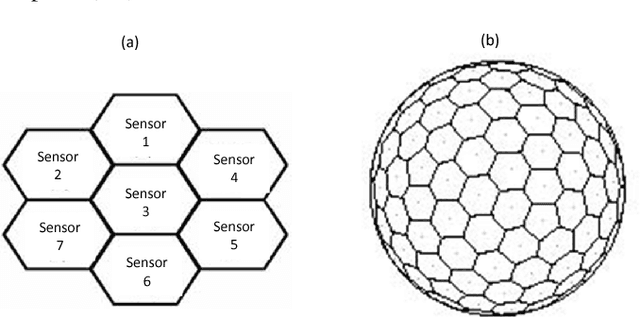
The existing lensless compressive camera ($\text{L}^2\text{C}^2$)~\cite{Huang13ICIP} suffers from low capture rates, resulting in low resolution images when acquired over a short time. In this work, we propose a new regime to mitigate these drawbacks. We replace the global-based compressive sensing used in the existing $\text{L}^2\text{C}^2$ by the local block (patch) based compressive sensing. We use a single sensor for each block, rather than for the entire image, thus forming a multiple but spatially parallel sensor $\text{L}^2\text{C}^2$. This new camera retains the advantages of existing $\text{L}^2\text{C}^2$ while leading to the following additional benefits: 1) Since each block can be very small, {\em e.g.}$~8\times 8$ pixels, we only need to capture $\sim 10$ measurements to achieve reasonable reconstruction. Therefore the capture time can be reduced significantly. 2) The coding patterns used in each block can be the same, therefore the sensing matrix is only of the block size compared to the entire image size in existing $\text{L}^2\text{C}^2$. This saves the memory requirement of the sensing matrix as well as speeds up the reconstruction. 3) Patch based image reconstruction is fast and since real time stitching algorithms exist, we can perform real time reconstruction. 4) These small blocks can be integrated to any desirable number, leading to ultra high resolution images while retaining fast capture rate and fast reconstruction. We develop multiple geometries of this block-wise $\text{L}^2\text{C}^2$ in this paper. We have built prototypes of the proposed block-wise $\text{L}^2\text{C}^2$ and demonstrated excellent results of real data.