 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlock Contextual MDPs for Continual Learning
Paper and Code
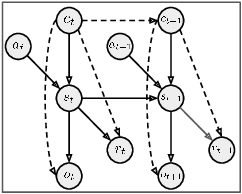
In reinforcement learning (RL), when defining a Markov Decision Process (MDP), the environment dynamics is implicitly assumed to be stationary. This assumption of stationarity, while simplifying, can be unrealistic in many scenarios. In the continual reinforcement learning scenario, the sequence of tasks is another source of nonstationarity. In this work, we propose to examine this continual reinforcement learning setting through the block contextual MDP (BC-MDP) framework, which enables us to relax the assumption of stationarity. This framework challenges RL algorithms to handle both nonstationarity and rich observation settings and, by additionally leveraging smoothness properties, enables us to study generalization bounds for this setting. Finally, we take inspiration from adaptive control to propose a novel algorithm that addresses the challenges introduced by this more realistic BC-MDP setting, allows for zero-shot adaptation at evaluation time, and achieves strong performance on several nonstationary environments.