 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBipedal Walking on Constrained Footholds: Momentum Regulation via Vertical COM Control
Paper and Code
Apr 21, 2021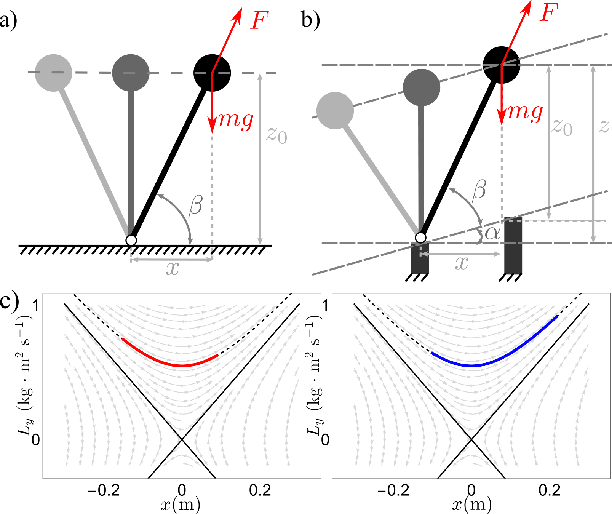
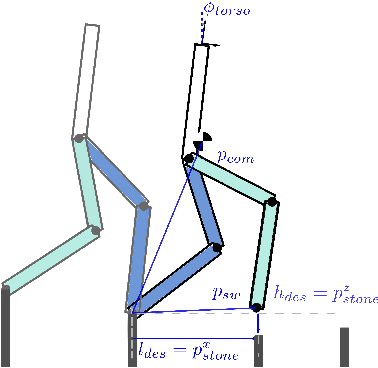

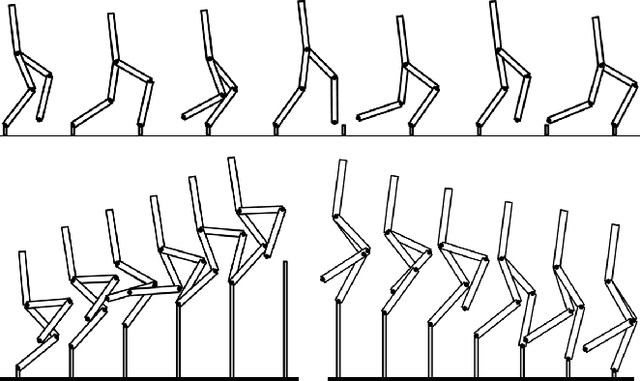
This paper presents an online walking gait synthesis and a feedback control methodology to enable stable walking on constrained footholds for bipedal robots. For this challenging task, the foot placement and center of pressure cannot be changed, which hinders the application of state-of-art stepping controllers or zero-moment-point (ZMP) based approaches for walking generation. As a result, this paper takes a different approach to modulate the change of the angular momentum about the foot-ground contact pivot at the discrete impact with vertical center of mass (COM) velocity. We utilize the underactuated Linear Inverted Pendulum (LIP) model for approximating the underactuated walking dynamics to provide the desired post-impact angular momentum for each step. Outputs are constructed via online optimization combined with closed-form polynomials and then tracked via a quadratic program based controller. This method is implemented online on two robot models, AMBER and Cassie, for which stable walking behaviors with constrained footholds are realized on flat ground, stairs, and randomly located stepping stones.