 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBinaural SoundNet: Predicting Semantics, Depth and Motion with Binaural Sounds
Paper and Code
Sep 06, 2021
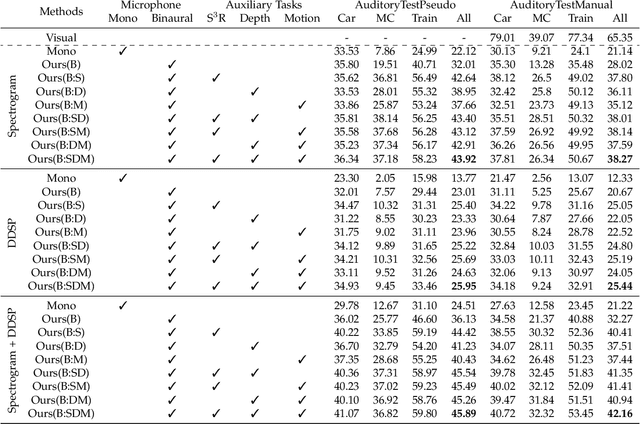
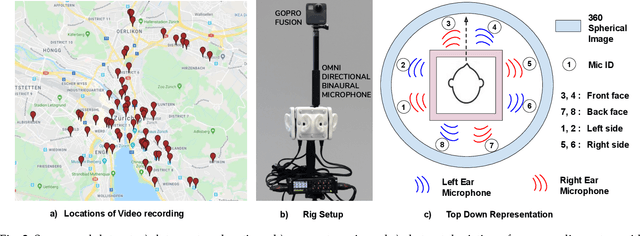
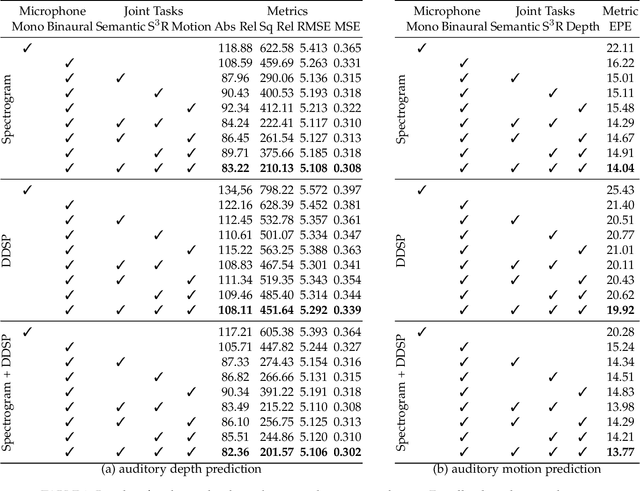
Humans can robustly recognize and localize objects by using visual and/or auditory cues. While machines are able to do the same with visual data already, less work has been done with sounds. This work develops an approach for scene understanding purely based on binaural sounds. The considered tasks include predicting the semantic masks of sound-making objects, the motion of sound-making objects, and the depth map of the scene. To this aim, we propose a novel sensor setup and record a new audio-visual dataset of street scenes with eight professional binaural microphones and a 360-degree camera. The co-existence of visual and audio cues is leveraged for supervision transfer. In particular, we employ a cross-modal distillation framework that consists of multiple vision teacher methods and a sound student method -- the student method is trained to generate the same results as the teacher methods do. This way, the auditory system can be trained without using human annotations. To further boost the performance, we propose another novel auxiliary task, coined Spatial Sound Super-Resolution, to increase the directional resolution of sounds. We then formulate the four tasks into one end-to-end trainable multi-tasking network aiming to boost the overall performance. Experimental results show that 1) our method achieves good results for all four tasks, 2) the four tasks are mutually beneficial -- training them together achieves the best performance, 3) the number and orientation of microphones are both important, and 4) features learned from the standard spectrogram and features obtained by the classic signal processing pipeline are complementary for auditory perception tasks. The data and code are released.