 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBIMS-PU: Bi-Directional and Multi-Scale Point Cloud Upsampling
Paper and Code
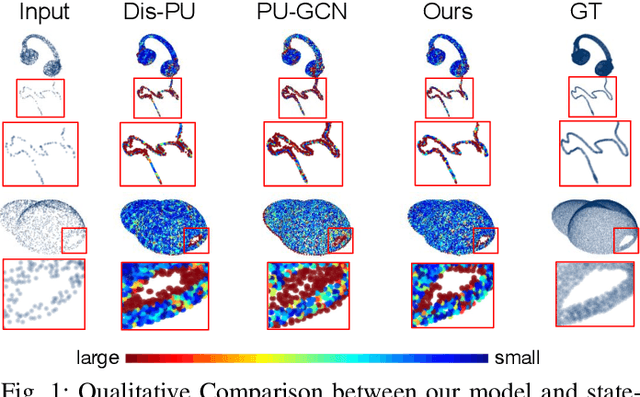
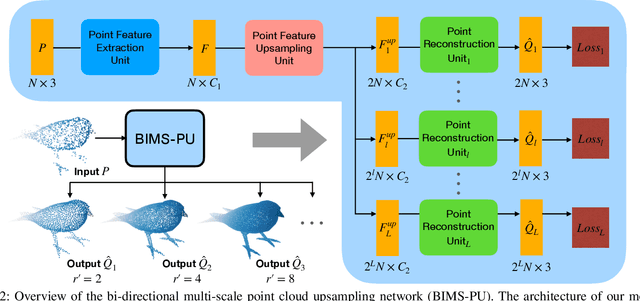
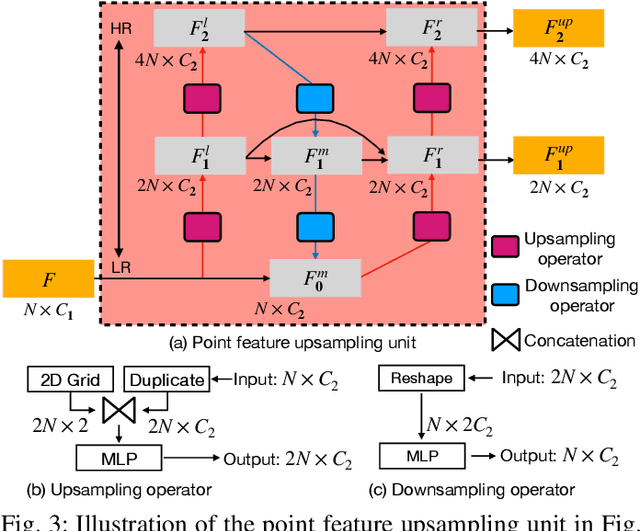
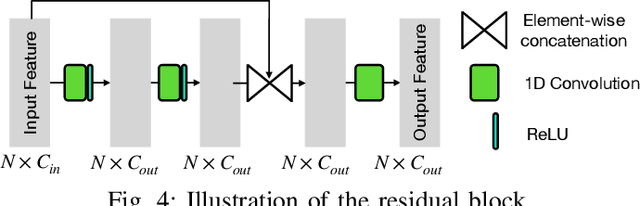
The learning and aggregation of multi-scale features are essential in empowering neural networks to capture the fine-grained geometric details in the point cloud upsampling task. Most existing approaches extract multi-scale features from a point cloud of a fixed resolution, hence obtain only a limited level of details. Though an existing approach aggregates a feature hierarchy of different resolutions from a cascade of upsampling sub-network, the training is complex with expensive computation. To address these issues, we construct a new point cloud upsampling pipeline called BIMS-PU that integrates the feature pyramid architecture with a bi-directional up and downsampling path. Specifically, we decompose the up/downsampling procedure into several up/downsampling sub-steps by breaking the target sampling factor into smaller factors. The multi-scale features are naturally produced in a parallel manner and aggregated using a fast feature fusion method. Supervision signal is simultaneously applied to all upsampled point clouds of different scales. Moreover, we formulate a residual block to ease the training of our model. Extensive quantitative and qualitative experiments on different datasets show that our method achieves superior results to state-of-the-art approaches. Last but not least, we demonstrate that point cloud upsampling can improve robot perception by ameliorating the 3D data quality.