 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBetter Together: Online Probabilistic Clique Change Detection in 3D Landmark-Based Maps
Paper and Code
Aug 02, 2020
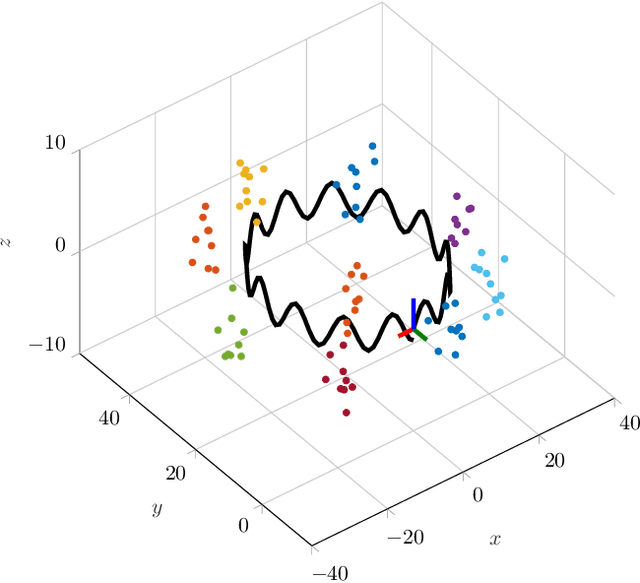
Many modern simultaneous localization and mapping (SLAM) techniques rely on sparse landmark-based maps due to their real-time performance. However, these techniques frequently assert that these landmarks are fixed in position over time, known as the static-world assumption. This is rarely, if ever, the case in most real-world environments. Even worse, over long deployments, robots are bound to observe traditionally static landmarks change, for example when an autonomous vehicle encounters a construction zone. This work addresses this challenge, accounting for changes in complex three-dimensional environments with the creation of a probabilistic filter that operates on the features that give rise to landmarks. To accomplish this, landmarks are clustered into cliques and a filter is developed to estimate their persistence jointly among observations of the landmarks in a clique. This filter uses estimated spatial-temporal priors of geometric objects, allowing for dynamic and semi-static objects to be removed from a formally static map. The proposed algorithm is validated in a 3D simulated environment.