 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Simulated Robotic Manipulation through a Real World Dataset
Paper and Code
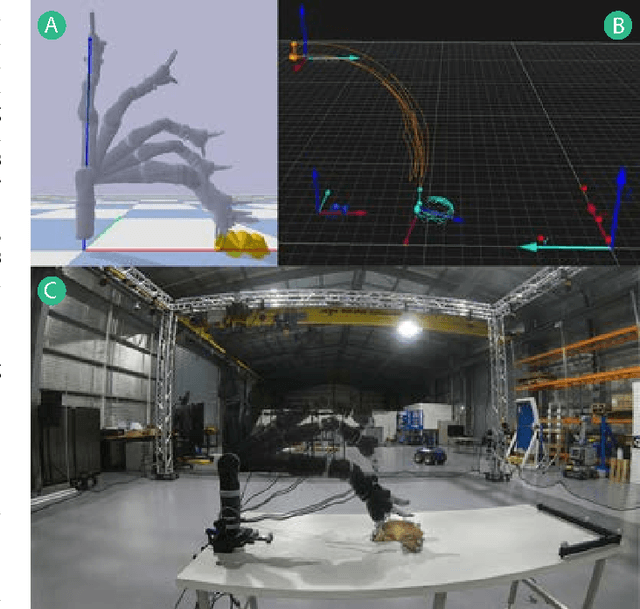
We present a benchmark to facilitate simulated manipulation; an attempt to overcome the obstacles of physical benchmarks through the distribution of a real world, ground truth dataset. Users are given various simulated manipulation tasks with assigned protocols having the objective of replicating the real world results of a recorded dataset. The benchmark comprises of a range of metrics used to characterise the successes of submitted environments whilst providing insight into their deficiencies. We apply our benchmark to two simulation environments, PyBullet and V-Rep, and publish the results. All materials required to benchmark an environment, including protocols and the dataset, can be found at the benchmarks' website https://research.csiro.au/robotics/manipulation-benchmark/.