 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesOD: A Bayesian Approach for Uncertainty Estimation in Deep Object Detectors
Paper and Code
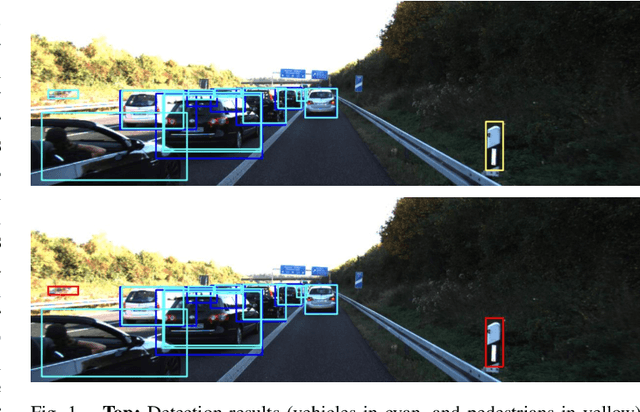
One of the challenging aspects of incorporating deep neural networks into robotic systems is the lack of uncertainty measures associated with their output predictions. Recent work has identified aleatoric and epistemic as two types of uncertainty in the output of deep neural networks, and provided methods for their estimation. However, these methods have had limited success when applied to the object detection task. This paper introduces, BayesOD, a Bayesian approach for estimating the uncertainty in the output of deep object detectors, which reformulates the neural network inference and Non-Maximum suppression components of standard object detectors from a Bayesian perspective. As a result, BayesOD provides uncertainty estimates associated with detected object instances, which allows the deep object detector to be treated as any other sensor in a robotic system. BayesOD is shown to be capable of reliably identifying erroneous detection output instances using their estimated uncertainty measure. The estimated uncertainty measures are also shown to be better correlated with the correctness of a detection than the state of the art methods available in literature.