 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Inverse Transition Learning for Offline Settings
Paper and Code
Aug 09, 2023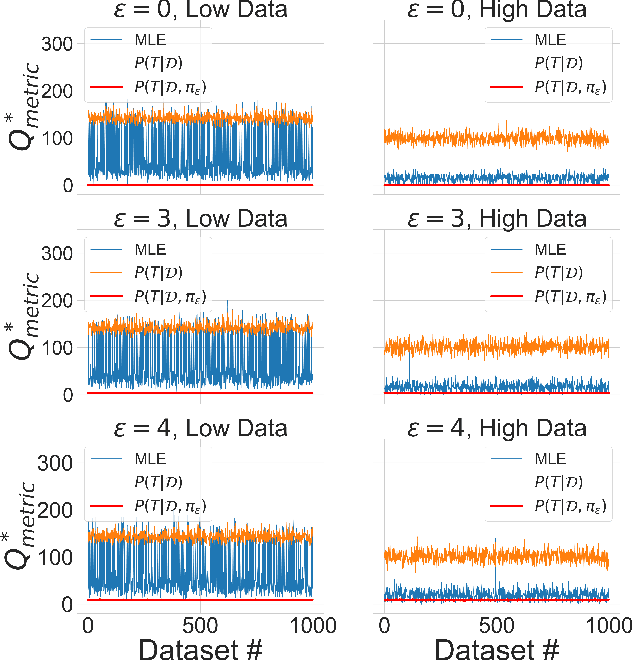
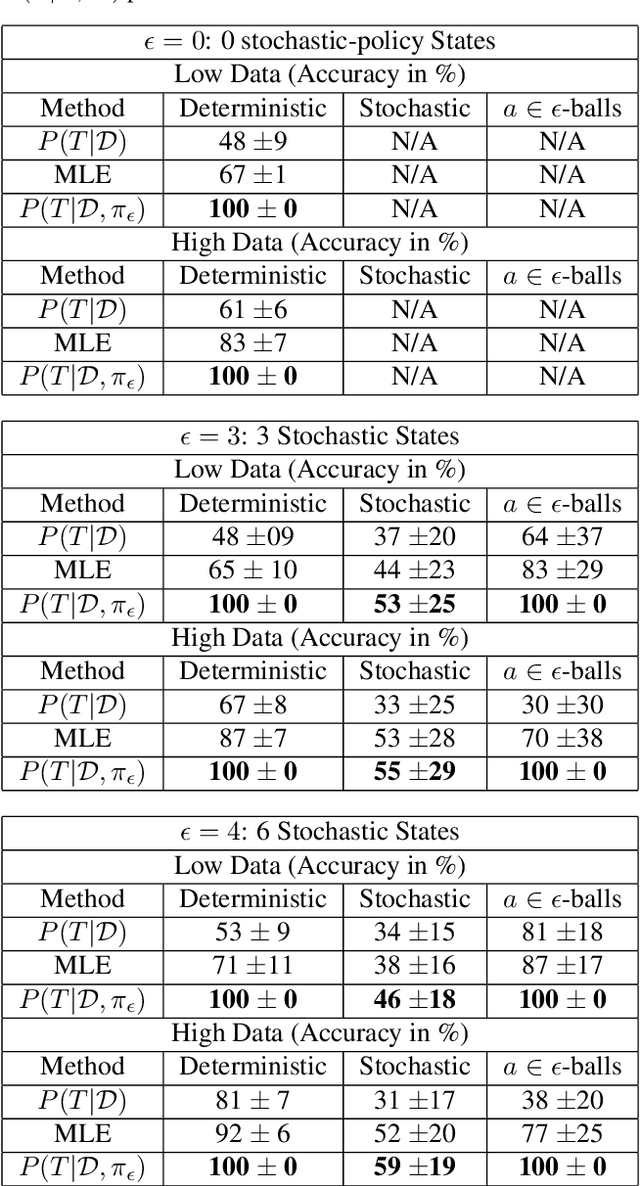
Offline Reinforcement learning is commonly used for sequential decision-making in domains such as healthcare and education, where the rewards are known and the transition dynamics $T$ must be estimated on the basis of batch data. A key challenge for all tasks is how to learn a reliable estimate of the transition dynamics $T$ that produce near-optimal policies that are safe enough so that they never take actions that are far away from the best action with respect to their value functions and informative enough so that they communicate the uncertainties they have. Using data from an expert, we propose a new constraint-based approach that captures our desiderata for reliably learning a posterior distribution of the transition dynamics $T$ that is free from gradients. Our results demonstrate that by using our constraints, we learn a high-performing policy, while considerably reducing the policy's variance over different datasets. We also explain how combining uncertainty estimation with these constraints can help us infer a partial ranking of actions that produce higher returns, and helps us infer safer and more informative policies for planning.