 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Autoencoders for Drift Detection in Industrial Environments
Paper and Code

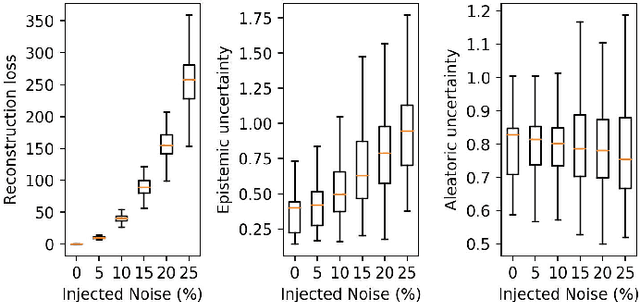


Autoencoders are unsupervised models which have been used for detecting anomalies in multi-sensor environments. A typical use includes training a predictive model with data from sensors operating under normal conditions and using the model to detect anomalies. Anomalies can come either from real changes in the environment (real drift) or from faulty sensory devices (virtual drift); however, the use of Autoencoders to distinguish between different anomalies has not yet been considered. To this end, we first propose the development of Bayesian Autoencoders to quantify epistemic and aleatoric uncertainties. We then test the Bayesian Autoencoder using a real-world industrial dataset for hydraulic condition monitoring. The system is injected with noise and drifts, and we have found the epistemic uncertainty to be less sensitive to sensor perturbations as compared to the reconstruction loss. By observing the reconstructed signals with the uncertainties, we gain interpretable insights, and these uncertainties offer a potential avenue for distinguishing real and virtual drifts.