 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBatch based Monocular SLAM for Egocentric Videos
Paper and Code
Jul 18, 2017


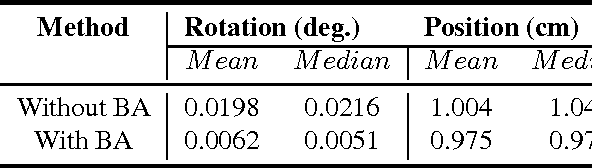
Simultaneous Localization and Mapping (SLAM) from a monocular camera has been a well researched area. However, estimating camera pose and 3d geometry reliably for egocentric videos still remain a challenge. Some of the common causes of failures are dominant 3D rotations and low parallax between successive frames, resulting in unreliable pose and 3d estimates. For forward moving cameras, with no opportunities for loop closures, the drift leads to eventual failures for traditional feature based and direct SLAM techniques. We propose a novel batch mode structure from motion based technique for robust SLAM in such scenarios. In contrast to most of the existing techniques, we process frames in short batches, wherein we exploit short loop closures arising out of to-and-fro motion of wearer's head, and stabilize the egomotion estimates by 2D batch mode techniques such as motion averaging on pairwise epipolar results. Once pose estimates are obtained reliably over a batch, we refine the 3d estimate by triangulation and batch mode Bundle Adjustment (BA). Finally, we merge the batches using 3D correspondences and carry out a BA refinement post merging. We present both qualitative and quantitative comparison of our method on various public first and third person video datasets, to establish the robustness and accuracy of our algorithm over the state of the art.