 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBarrier Bayesian Linear Regression: Online Learning of Control Barrier Conditions for Safety-Critical Control of Uncertain Systems
Paper and Code
Apr 08, 2022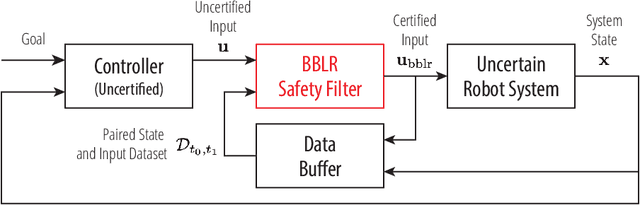
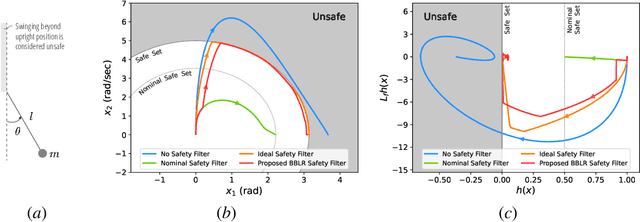
In this work, we consider the problem of designing a safety filter for a nonlinear uncertain control system. Our goal is to augment an arbitrary controller with a safety filter such that the overall closed-loop system is guaranteed to stay within a given state constraint set, referred to as being safe. For systems with known dynamics, control barrier functions (CBFs) provide a scalar condition for determining if a system is safe. For uncertain systems, robust or adaptive CBF certification approaches have been proposed. However, these approaches can be conservative or require the system to have a particular parametric structure. For more generic uncertain systems, machine learning approaches have been used to approximate the CBF condition. These works typically assume that the learning module is sufficiently trained prior to deployment. Safety during learning is not guaranteed. We propose a barrier Bayesian linear regression (BBLR) approach that guarantees safe online learning of the CBF condition for the true, uncertain system. We assume that the error between the nominal system and the true system is bounded and exploit the structure of the CBF condition. We show that our approach can safely expand the set of certifiable control inputs despite system and learning uncertainties. The effectiveness of our approach is demonstrated in simulation using a two-dimensional pendulum stabilization task.