Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBack to square one: probabilistic trajectory forecasting without bells and whistles
Paper and Code
Dec 07, 2018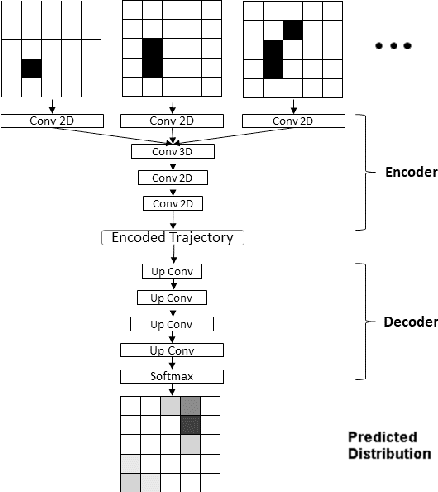
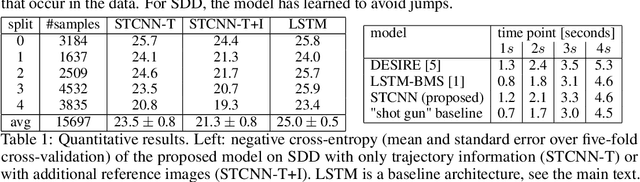
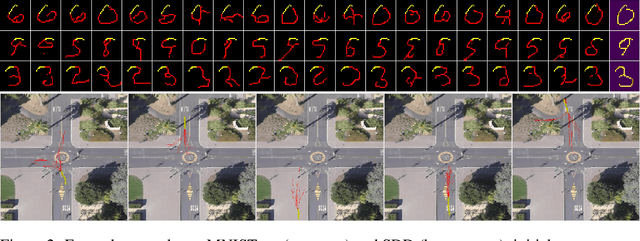
We introduce a spatio-temporal convolutional neural network model for trajectory forecasting from visual sources. Applied in an auto-regressive way it provides an explicit probability distribution over continuations of a given initial trajectory segment. We discuss it in relation to (more complicated) existing work and report on experiments on two standard datasets for trajectory forecasting: MNISTseq and Stanford Drones, achieving results on-par with or better than previous methods.
* 4 pages, 3 figures, Workshop on Modeling and Decision-Making in the
Spatiotemporal Domain, 32nd Conference on Neural Information Processing
Systems (NIPS 2018), Montreal, Canada
View paper on