 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAvoiding dynamic small obstacles with onboard sensing and computating on aerial robots
Paper and Code

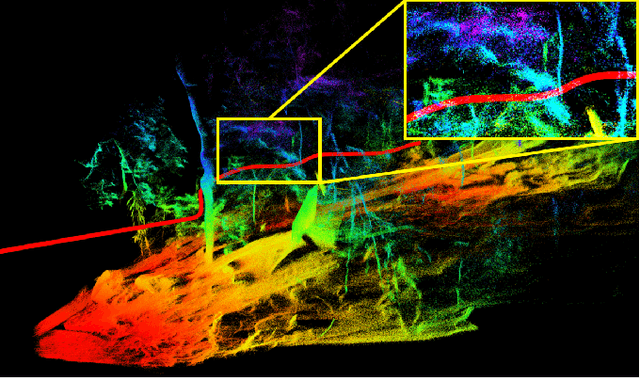


In practical applications, autonomous quadrotors are still facing significant challenges, such as the detection and avoidance of very small and even dynamic obstacles (e.g., tree branches, power lines). In this paper, we propose a compact, integrated, and fully autonomous quadrotor system, which can fly safely in cluttered environments while avoiding dynamic small obstacles. Our quadrotor platform is equipped with a forward-looking three-dimensional (3D) light detection and ranging (lidar) sensor to perceive the environment and an onboard embedded computer to perform all the estimation, mapping, and planning tasks. Specifically, the computer estimates the current pose of the UAV, maintains a local map (time-accumulated point clouds KD-Trees), and computes a safe trajectory using kinodynamic A* search to the goal point. The whole perception and planning system can run onboard at 50Hz with careful optimization. Various indoor and outdoor experiments show that the system can avoid dynamic small obstacles (down to 20mm diameter bar) while flying at 2m/s in cluttered environments. Our codes and hardware design are open-sourced on Github.