 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Person-Specific Following Robot
Paper and Code
Nov 11, 2020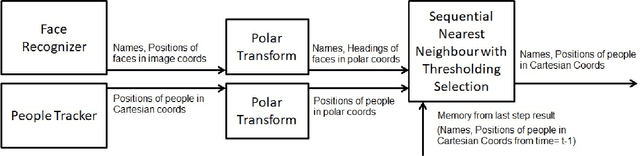
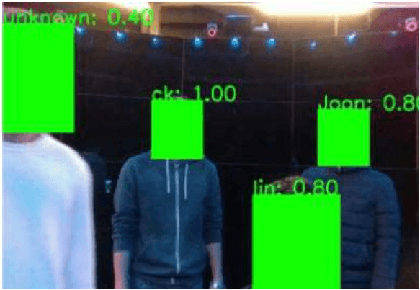
Following a specific user is a desired or even required capability for service robots in many human-robot collaborative applications. However, most existing person-following robots follow people without knowledge of who it is following. In this paper, we proposed an identity-specific person tracker, capable of tracking and identifying nearby people, to enable person-specific following. Our proposed method uses a Sequential Nearest Neighbour with Thresholding Selection algorithm we devised to fuse together an anonymous person tracker and a face recogniser. Experiment results comparing our proposed method with alternative approaches showed that our method achieves better performance in tracking and identifying people, as well as improved robot performance in following a target individual.