 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Obstacle Avoidance by Learning Policies for Reference Modification
Paper and Code

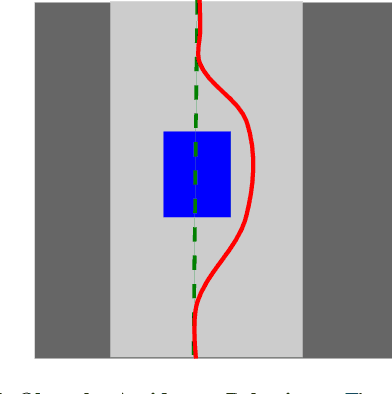
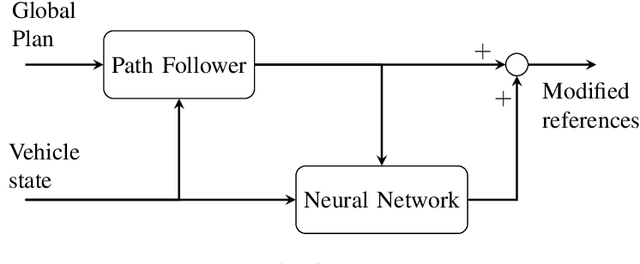

The key problem for autonomous robots is how to navigate through complex, obstacle filled environments. The navigation problem is broken up into generating a reference path to the goal and then using a local planner to track the reference path and avoid obstacles by generating velocity and steering references for a control system to execute. This paper presents a novel local planner architecture for path following and obstacle avoidance by proposing a hybrid system that uses a classic path following algorithm in parallel with a neural network. Our solution, called the modification architecture, uses a path following algorithm to follow a reference path and a neural network to modify the references generated by the path follower in order to prevent collisions. The neural network is trained using reinforcement learning to deviate from the reference trajectory just enough to avoid crashing. We present our local planner in a hierarchical planning framework, nested between a global reference planner and a low-level control system. The system is evaluated in the context of F1/10th scale autonomous racing in random forests and on a race track. The results demonstrate that our solution is able to follow a reference trajectory while avoiding obstacles using only 10 sparse laser range finder readings. Our hybrid system overcomes previous limitations by not requiring an obstacle map, human demonstrations, or an instrumented training setup.