 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous driving challenge: To Infer the property of a dynamic object based on its motion pattern using recurrent neural network
Paper and Code
Sep 10, 2016
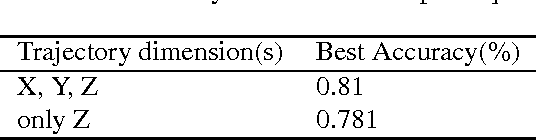
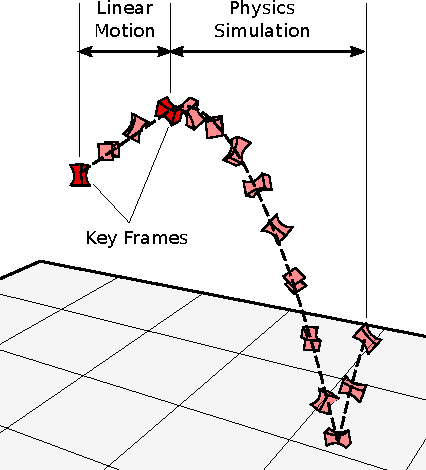
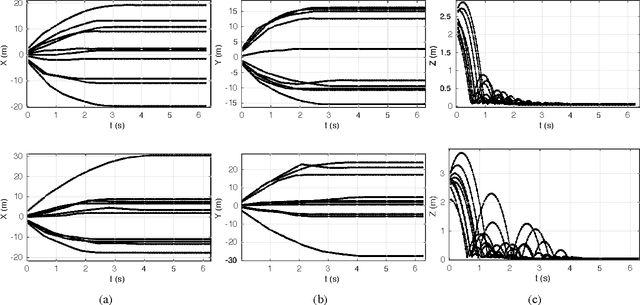
In autonomous driving applications a critical challenge is to identify action to take to avoid an obstacle on collision course. For example, when a heavy object is suddenly encountered it is critical to stop the vehicle or change the lane even if it causes other traffic disruptions. However,there are situations when it is preferable to collide with the object rather than take an action that would result in a much more serious accident than collision with the object. For example, a heavy object which falls from a truck should be avoided whereas a bouncing ball or a soft target such as a foam box need not be.We present a novel method to discriminate between the motion characteristics of these types of objects based on their physical properties such as bounciness, elasticity, etc.In this preliminary work, we use recurrent neural net-work with LSTM cells to train a classifier to classify objects based on their motion trajectories. We test the algorithm on synthetic data, and, as a proof of concept, demonstrate its effectiveness on a limited set of real-world data.