 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Cave Surveying with an Aerial Robot
Paper and Code
Mar 31, 2020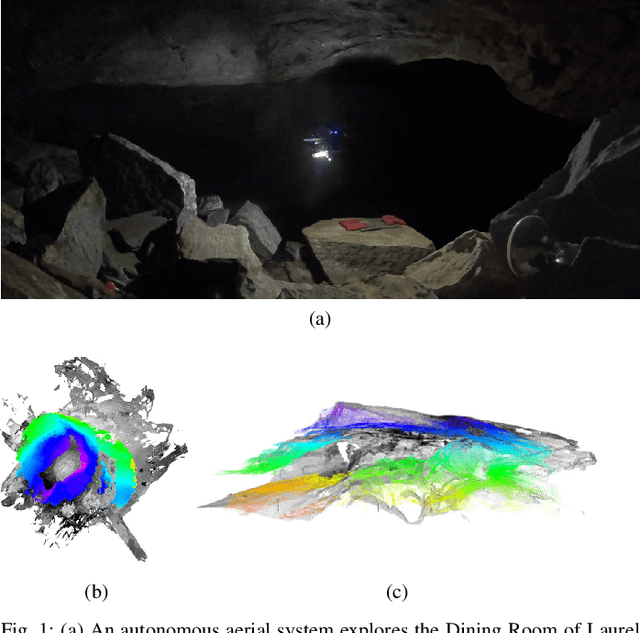
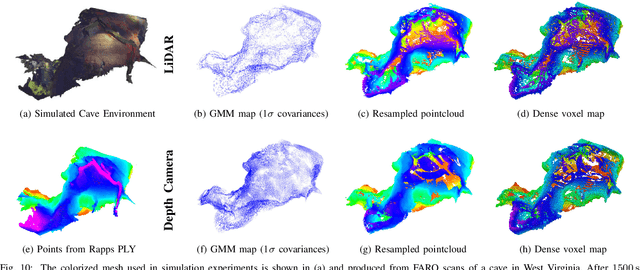
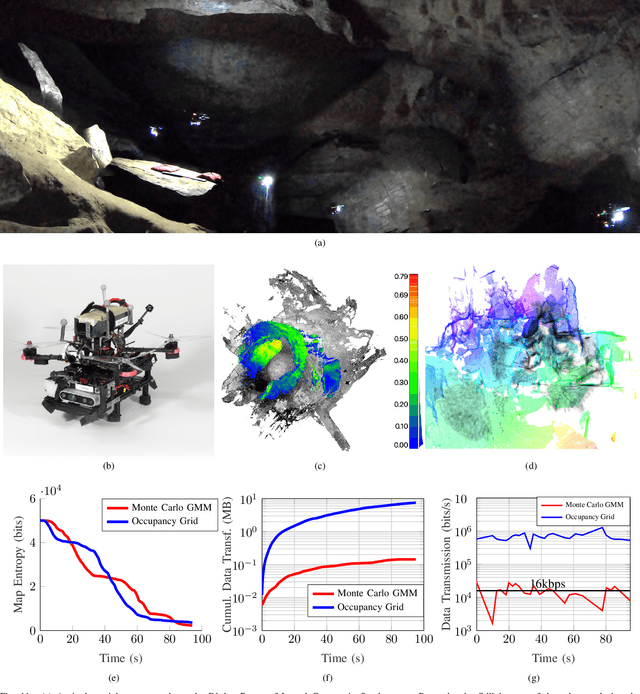
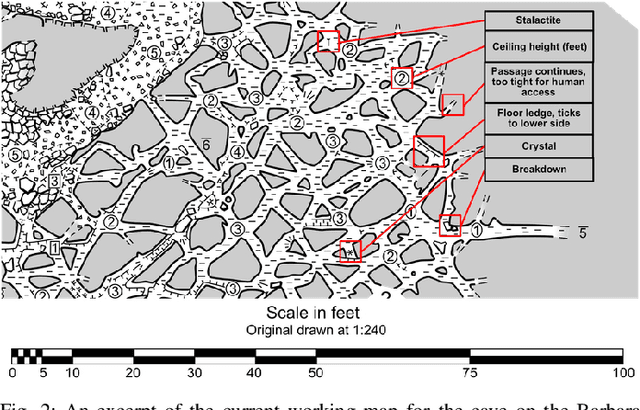
This paper presents a method for cave surveying in complete darkness with an autonomous aerial vehicle equipped with a depth camera for mapping, downward-facing camera for state estimation, and forward and downward lights. Traditional methods of cave surveying are labor-intensive and dangerous due to the risk of hypothermia when collecting data over extended periods of time in cold and damp environments, the risk of injury when operating in darkness in rocky or muddy environments, and the potential structural instability of the subterranean environment. Robots could be leveraged to reduce risk to human surveyors, but undeveloped caves are challenging environments in which to operate due to low-bandwidth or nonexistent communications infrastructure. The potential for communications dropouts motivates autonomy in this context. Because the topography of the environment may not be known a priori, it is advantageous for human operators to receive real-time feedback of high-resolution map data that encodes both large and small passageways. Given this capability, directed exploration, where human operators transmit guidance to the autonomous robot to prioritize certain leads over others, lies within the realm of the possible. Few state-of-the-art, high-resolution perceptual modeling techniques quantify the time to transfer the model across low bandwidth, high reliability communications channels such as radio. To bridge this gap in the state of the art, this work compactly represents sensor observations as Gaussian mixture models and maintains a local occupancy grid map for a motion planner that greedily maximizes an information-theoretic objective function. The methodology is extensively evaluated in long duration simulations on an embedded PC and deployed to an aerial system in Laurel Caverns, a commercially owned and operated cave in Southwestern Pennsylvania, USA.