 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous and cooperative design of the monitor positions for a team of UAVs to maximize the quantity and quality of detected objects
Paper and Code
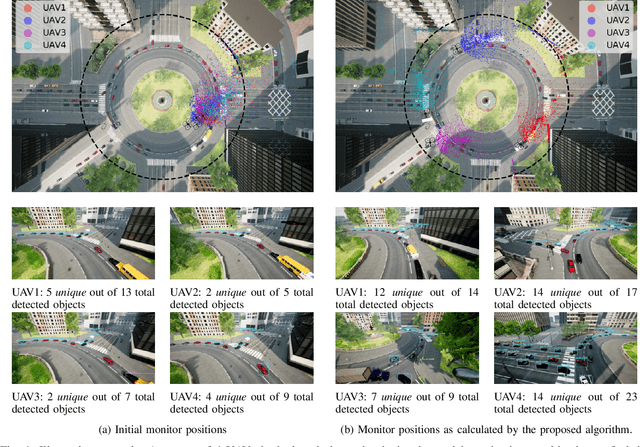

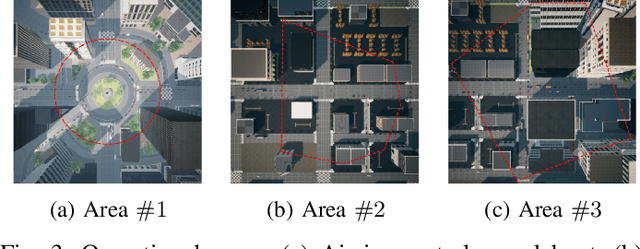

This paper tackles the problem of positioning a swarm of UAVs inside a completely unknown terrain, having as objective to maximize the overall situational awareness. The situational awareness is expressed by the number and quality of unique objects of interest, inside the UAVs' fields of view. YOLOv3 and a system to identify duplicate objects of interest were employed to assign a single score to each UAVs' configuration. Then, a novel navigation algorithm, capable of optimizing the previously defined score, without taking into consideration the dynamics of either UAVs or environment, is proposed. A cornerstone of the proposed approach is that it shares the same convergence characteristics as the block coordinate descent (BCD) family of approaches. The effectiveness and performance of the proposed navigation scheme were evaluated utilizing a series of experiments inside the AirSim simulator. The experimental evaluation indicates that the proposed navigation algorithm was able to consistently navigate the swarm of UAVs to "strategic" monitoring positions and also adapt to the different number of swarm sizes. Source code is available at https://github.com/dimikout3/ConvCAOAirSim.