 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Aerial Delivery Vehicles, a Survey of Techniques on how Aerial Package Delivery is Achieved
Paper and Code
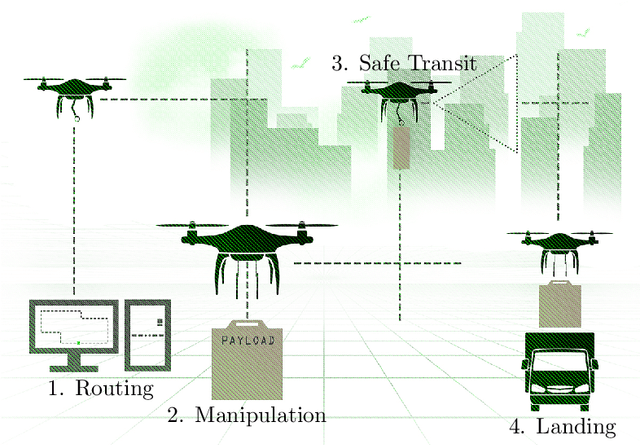
Autonomous aerial delivery vehicles have gained significant interest in the last decade. This has been enabled by technological advancements in aerial manipulators and novel grippers with enhanced force to weight ratios. Furthermore, improved control schemes and vehicle dynamics are better able to model the payload and improved perception algorithms to detect key features within the unmanned aerial vehicle's (UAV) environment. In this survey, a systematic review of the technological advancements and open research problems of autonomous aerial delivery vehicles is conducted. First, various types of manipulators and grippers are discussed in detail, along with dynamic modelling and control methods. Then, landing on static and dynamic platforms is discussed. Subsequently, risks such as weather conditions, state estimation and collision avoidance to ensure safe transit is considered. Finally, delivery UAV routing is investigated which categorises the topic into two areas: drone operations and drone-truck collaborative operations.