 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating Representation Discovery with MAP-Elites
Paper and Code
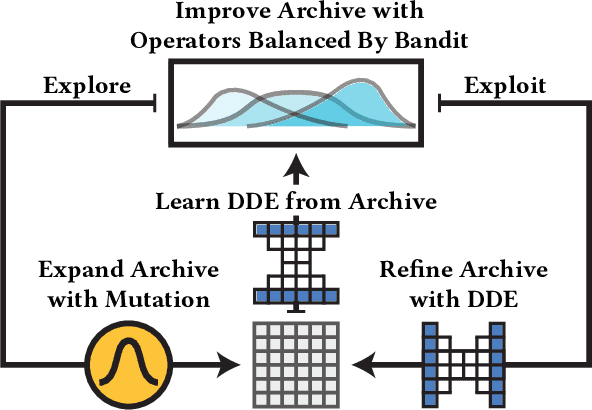
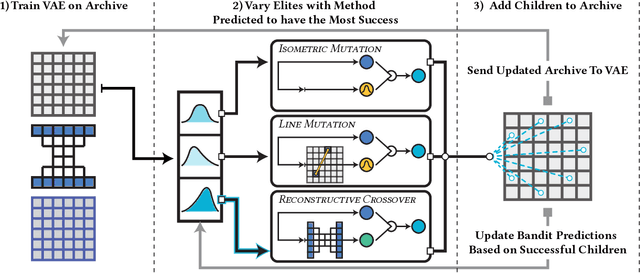
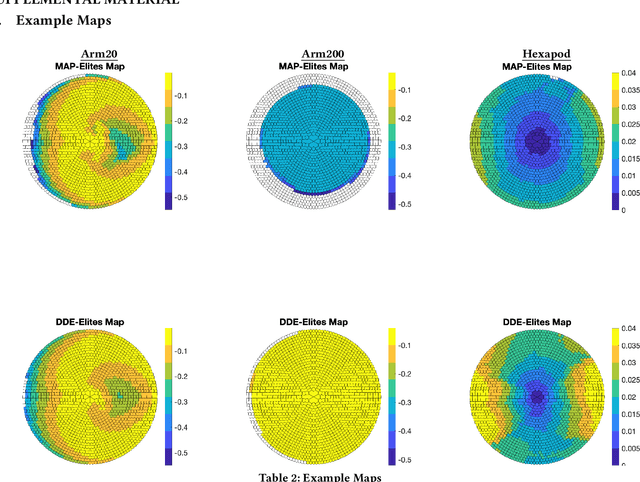
The way solutions are represented, or encoded, is usually the result of domain knowledge and experience. In this work, we combine MAP-Elites with Variational Autoencoders to learn a Data-Driven Encoding (DDE) that captures the essence of the highest-performing solutions while still able to encode a wide array of solutions. Our approach learns this data-driven encoding during optimization by balancing between exploiting the DDE to generalize the knowledge contained in the current archive of elites and exploring new representations that are not yet captured by the DDE. Learning representation during optimization allows the algorithm to solve high-dimensional problems, and provides a low-dimensional representation which can be then be re-used. We evaluate the DDE approach by evolving solutions for inverse kinematics of a planar arm (200 joint angles) and for gaits of a 6-legged robot in action space (a sequence of 60 positions for each of the 12 joints). We show that the DDE approach not only accelerates and improves optimization, but produces a powerful encoding that captures a bias for high performance while expressing a variety of solutions.