 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Impact-sounding Acoustic Inspection of Concrete Structure
Paper and Code
Oct 25, 2021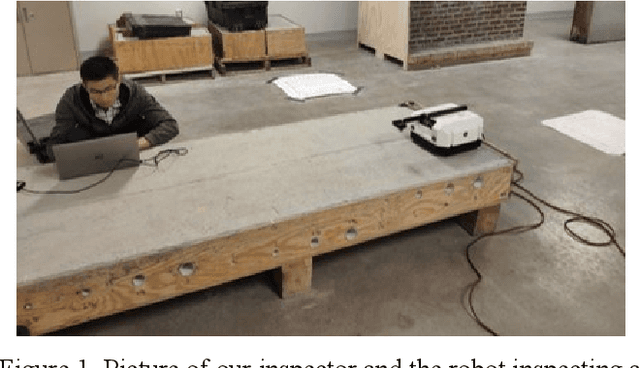
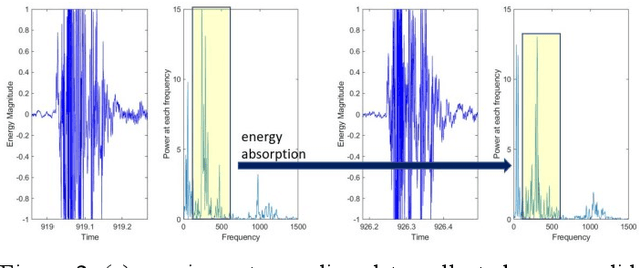
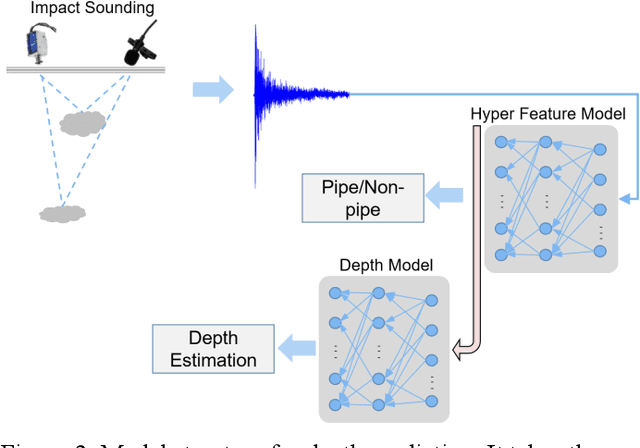

Impact sounding signal has been shown to contain information about structural integrity flaws and subsurface objects from previous research. As non-destructive testing (NDT) method, one of the biggest challenges in impact sounding based inspection is the subsurface targets detection and reconstruction. This paper presents the importance and practicability of using solenoids to trigger impact sounding signal and using acoustic data to reconstruct subsurface objects to address this issue. First, by taking advantage of Visual Simultaneous Localization and Mapping (V-SLAM), we could obtain the 3D position of the robot during the inspection. Second, our NDE method is based on Frequency Density (FD) analysis for the Fast Fourier Transform (FFT) of the impact sounding signal. At last, by combining the 3D position data and acoustic data, this paper creates a 3D map to highlight the possible subsurface objects. The experimental results demonstrate the feasibility of the method.