 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic extraction of similar traffic scenes from large naturalistic datasets using the Hausdorff distance
Paper and Code


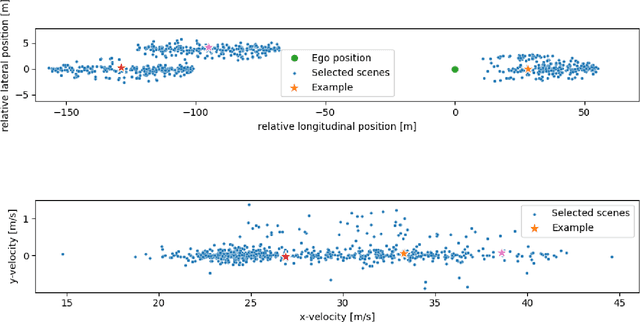
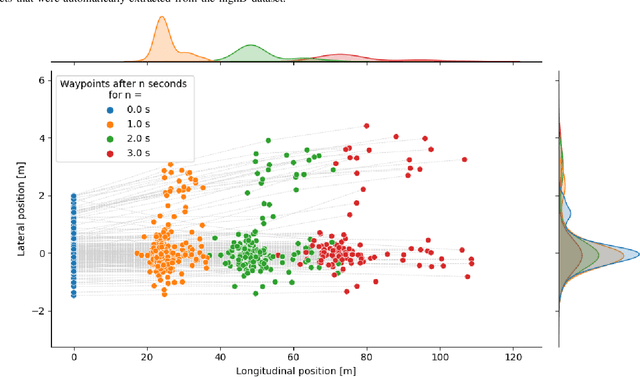
Recently, multiple naturalistic traffic datasets of human-driven trajectories have been published (e.g., highD, NGSim, and pNEUMA). These datasets have been used in studies that investigate variability in human driving behavior, for example for scenario-based validation of autonomous vehicle (AV) behavior, modeling driver behavior, or validating driver models. Thus far, these studies focused on the variability on an operational level (e.g., velocity profiles during a lane change), not on a tactical level (i.e., to change lanes or not). Investigating the variability on both levels is necessary to develop driver models and AVs that include multiple tactical behaviors. To expose multi-level variability, the human responses to the same traffic scene could be investigated. However, no method exists to automatically extract similar scenes from datasets. Here, we present a four-step extraction method that uses the Hausdorff distance, a mathematical distance metric for sets. We performed a case study on the highD dataset that showed that the method is practically applicable. The human responses to the selected scenes exposed the variability on both the tactical and operational levels. With this new method, the variability in operational and tactical human behavior can be investigated, without the need for costly and time-consuming driving-simulator experiments.