Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Construction of Real-World Datasets for 3D Object Localization using Two Cameras
Paper and Code
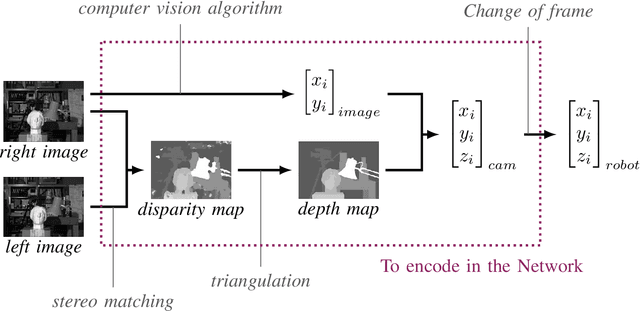
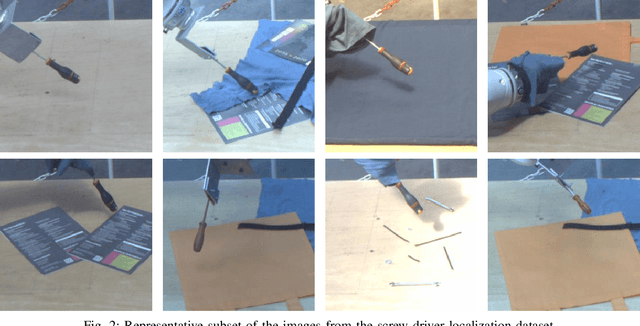

Unlike classification, position labels cannot be assigned manually by humans. For this reason, generating supervision for precise object localization is a hard task. This paper details a method to create large datasets for 3D object localization, with real world images, using an industrial robot to generate position labels. By knowledge of the geometry of the robot, we are able to automatically synchronize the images of the two cameras and the object 3D position. We applied it to generate a screw-driver localization dataset with stereo images, using a KUKA LBR iiwa robot. This dataset could then be used to train a CNN regressor to learn end-to-end stereo object localization from a set of two standard uncalibrated cameras.
* 5 pages, 3 figures, to appear in the proceedings of IECON 2018
(Special session on Collaborative Robots in Smart Manufacturing), Washington
D.C., USA
View paper on