 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Generation of Robotic Planning Domains from Observations
Paper and Code
May 28, 2021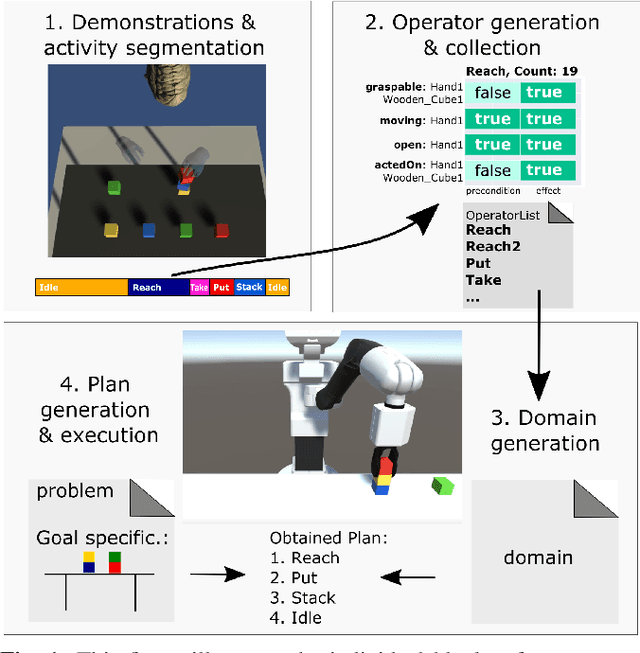
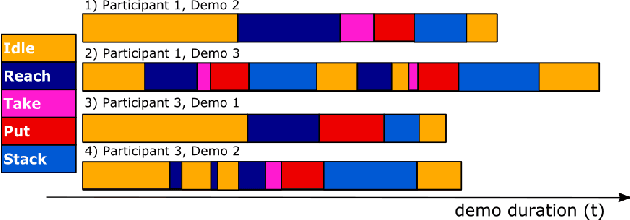
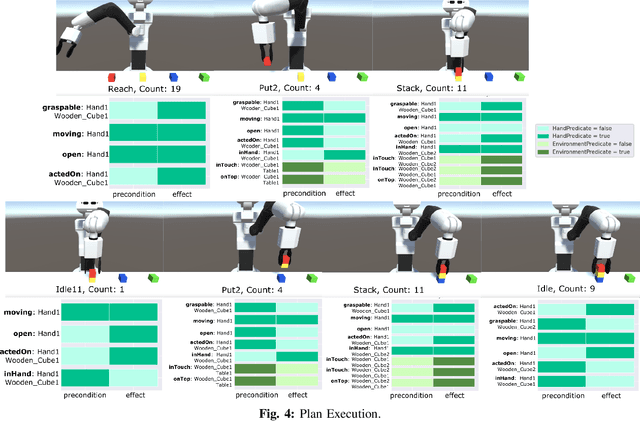
Automated planning enables robots to find plans to achieve complex, long-horizon tasks, given a planning domain. This planning domain consists of a list of actions, with their associated preconditions and effects, and is usually manually defined by a human expert, which is very time-consuming or even infeasible. In this paper, we introduce a novel method for generating this domain automatically from human demonstrations. First, we automatically segment and recognize the different observed actions from human demonstrations. From these demonstrations, the relevant preconditions and effects are obtained, and the associated planning operators are generated. Finally, a sequence of actions that satisfies a user-defined goal can be planned using a symbolic planner. The generated plan is executed in a simulated environment by the TIAGo robot. We tested our method on a dataset of 12 demonstrations collected from three different participants. The results show that our method is able to generate executable plans from using one single demonstration with a 92% success rate, and 100% when the information from all demonstrations are included, even for previously unknown stacking goals.