 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Formal Synthesis of Neural Barrier Certificates for Dynamical Models
Paper and Code
Jul 07, 2020
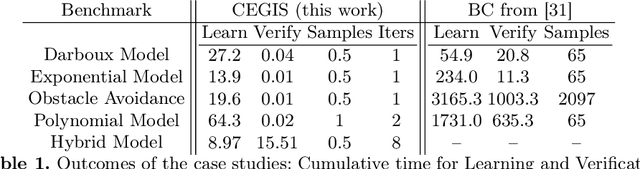
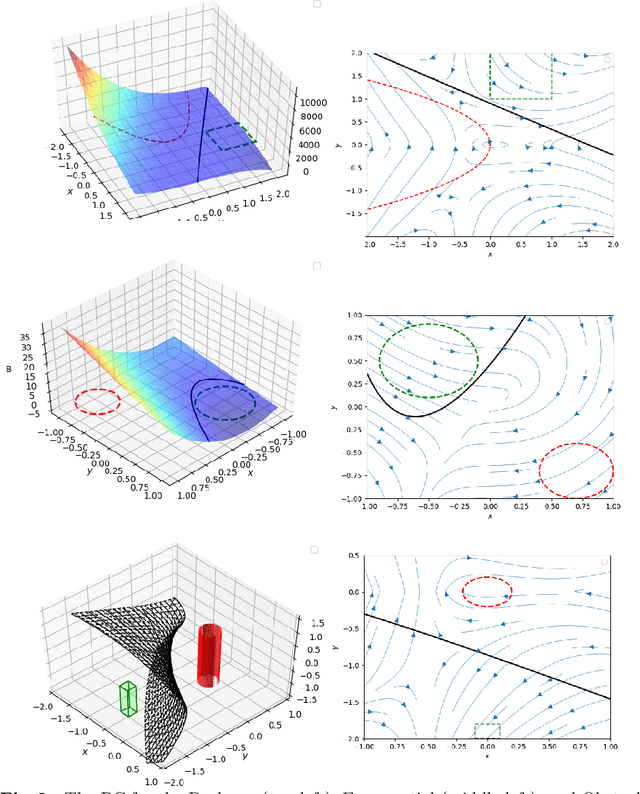
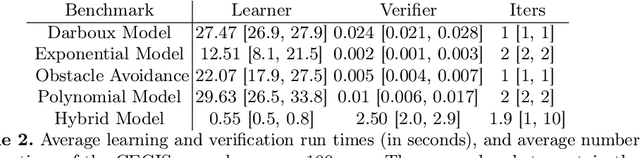
We introduce an automated, formal, counterexample-based approach to synthesise Barrier Certificates (BC) for the safety verification of continuous and hybrid dynamical models. The approach is underpinned by an inductive framework: this is structured as a sequential loop between a learner, which manipulates a candidate BC as a neural network, and a sound verifier, which either certifies through algorithmic proofs the candidate's validity or generates counter-examples to further guide the learner. We compare the approach against state-of-the-art techniques, over polynomial and non-polynomial dynamical models: the outcomes show that we can synthesise sound BCs up to two orders of magnitude faster, with in particular a stark speedup on the verification engine (up to five orders less), whilst needing a far smaller data set (up to three orders less) for the learning part. Beyond the state of the art, we further challenge the (verification side of the) approach on a hybrid dynamical model.