 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated and Sound Synthesis of Lyapunov Functions with SMT Solvers
Paper and Code
Jul 21, 2020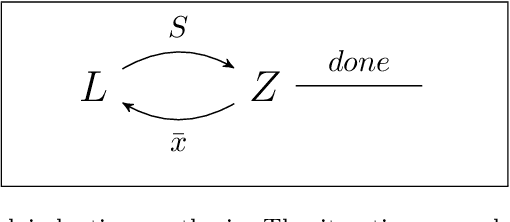
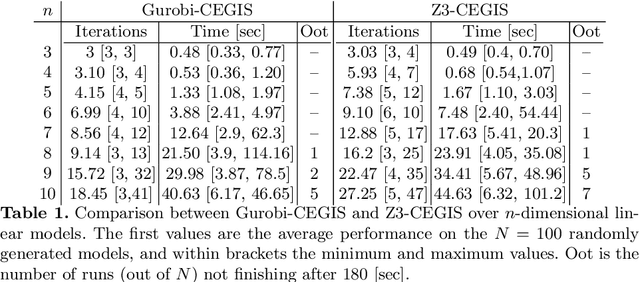
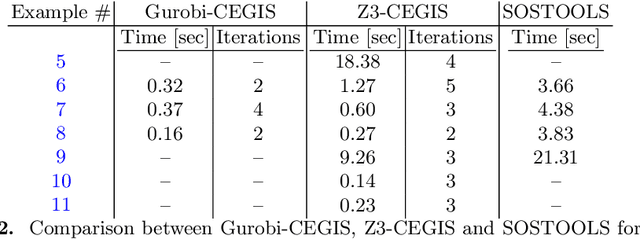
In this paper we employ SMT solvers to soundly synthesise Lyapunov functions that assert the stability of a given dynamical model. The search for a Lyapunov function is framed as the satisfiability of a second-order logical formula, asking whether there exists a function satisfying a desired specification (stability) for all possible initial conditions of the model. We synthesise Lyapunov functions for linear, non-linear (polynomial), and for parametric models. For non-linear models, the algorithm also determines a region of validity for the Lyapunov function. We exploit an inductive framework to synthesise Lyapunov functions, starting from parametric templates. The inductive framework comprises two elements: a learner proposes a Lyapunov function, and a verifier checks its validity - its lack is expressed via a counterexample (a point over the state space), for further use by the learner. Whilst the verifier uses the SMT solver Z3, thus ensuring the overall soundness of the procedure, we examine two alternatives for the learner: a numerical approach based on the optimisation tool Gurobi, and a sound approach based again on Z3. The overall technique is evaluated over a broad set of benchmarks, which shows that this methodology not only scales to 10-dimensional models within reasonable computational time, but also offers a novel soundness proof for the generated Lyapunov functions and their domains of validity.