Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmentation for Learning From Demonstration with Environmental Constraints
Paper and Code
Oct 13, 2022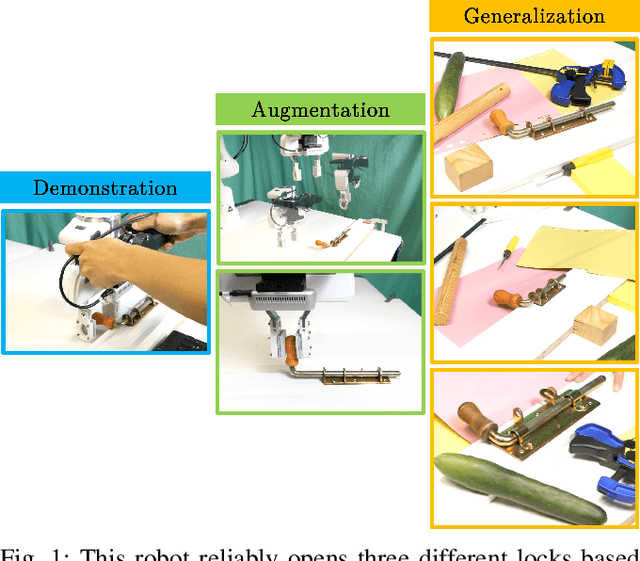

We introduce a Learning from Demonstration (LfD) approach for contact-rich manipulation tasks with articulated mechanisms. The extracted policy from a single human demonstration generalizes to different mechanisms of the same type and is robust against environmental variations. The key to achieving such generalization and robustness from a single human demonstration is to autonomously augment the initial demonstration to gather additional information through purposefully interacting with the environment. Our real-world experiments on complex mechanisms with multi-DOF demonstrate that our approach can reliably accomplish the task in a changing environment. Videos are available at the: https://sites.google.com/view/rbosalfdec/home
* Submitted to 2023 IEEE International Conference on Robotics and
Automation (ICRA)
View paper on