 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention-based Context Aggregation Network for Monocular Depth Estimation
Paper and Code

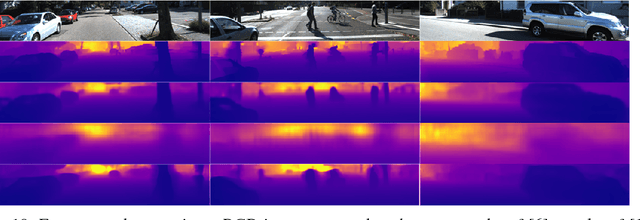


Depth estimation is a traditional computer vision task, which plays a crucial role in understanding 3D scene geometry. Recently, deep-convolutional-neural-networks based methods have achieved promising results in the monocular depth estimation field. Specifically, the framework that combines the multi-scale features extracted by the dilated convolution based block (atrous spatial pyramid pooling, ASPP) has gained the significant improvement in the dense labeling task. However, the discretized and predefined dilation rates cannot capture the continuous context information that differs in diverse scenes and easily introduce the grid artifacts in depth estimation. In this paper, we propose an attention-based context aggregation network (ACAN) to tackle these difficulties. Based on the self-attention model, ACAN adaptively learns the task-specific similarities between pixels to model the context information. First, we recast the monocular depth estimation as a dense labeling multi-class classification problem. Then we propose a soft ordinal inference to transform the predicted probabilities to continuous depth values, which can reduce the discretization error (about 1% decrease in RMSE). Second, the proposed ACAN aggregates both the image-level and pixel-level context information for depth estimation, where the former expresses the statistical characteristic of the whole image and the latter extracts the long-range spatial dependencies for each pixel. Third, for further reducing the inconsistency between the RGB image and depth map, we construct an attention loss to minimize their information entropy. We evaluate on public monocular depth-estimation benchmark datasets (including NYU Depth V2, KITTI). The experiments demonstrate the superiority of our proposed ACAN and achieve the competitive results with the state of the arts.