 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAtlas Fusion -- Modern Framework for Autonomous Agent Sensor Data Fusion
Paper and Code
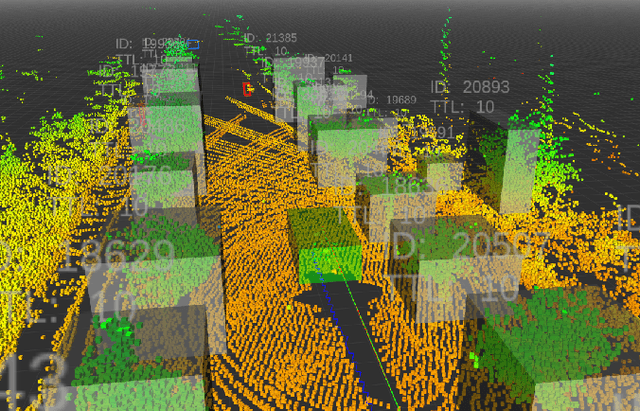
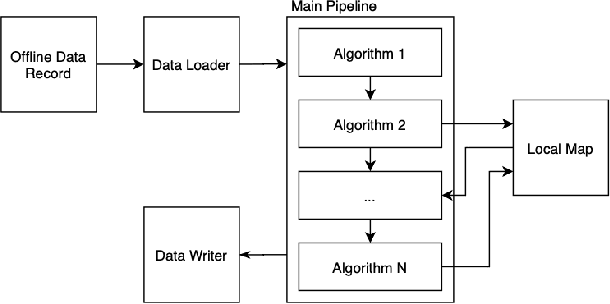
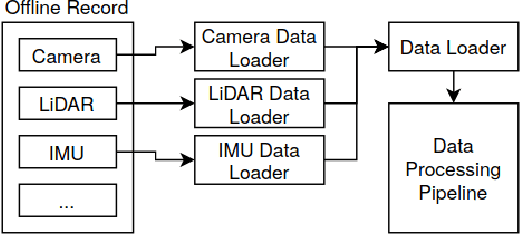
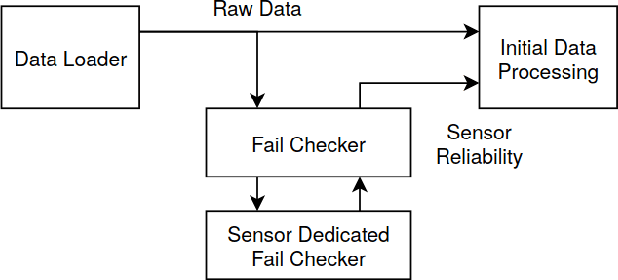
In this paper, we present our new sensor fusion framework for self-driving cars and other autonomous robots. We have designed our framework as a universal and scalable platform for building up a robust 3D model of the agent's surrounding environment by fusing a wide range of various sensors into the data model that we can use as a basement for the decision making and planning algorithms. Our software currently covers the data fusion of the RGB and thermal cameras, 3D LiDARs, 3D IMU, and a GNSS positioning. The framework covers a complete pipeline from data loading, filtering, preprocessing, environment model construction, visualization, and data storage. The architecture allows the community to modify the existing setup or to extend our solution with new ideas. The entire software is fully compatible with ROS (Robotic Operation System), which allows the framework to cooperate with other ROS-based software. The source codes are fully available as an open-source under the MIT license. See https://github.com/Robotics-BUT/Atlas-Fusion.