 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssessment of Reward Functions in Reinforcement Learning for Multi-Modal Urban Traffic Control under Real-World limitations
Paper and Code
Oct 17, 2020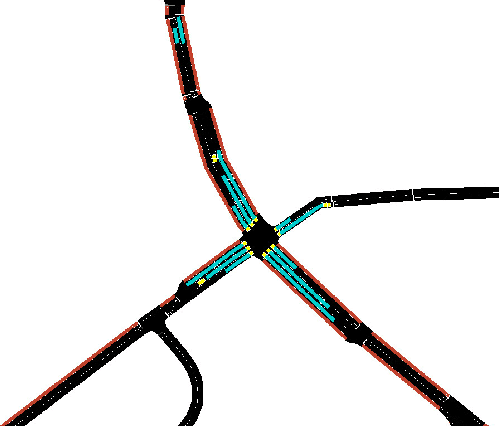

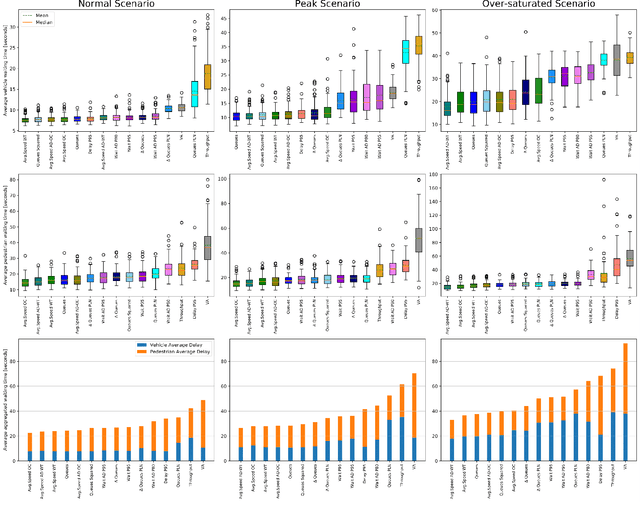

Reinforcement Learning is proving a successful tool that can manage urban intersections with a fraction of the effort required to curate traditional traffic controllers. However, literature on the introduction and control of pedestrians to such intersections is scarce. Furthermore, it is unclear what traffic state variables should be used as reward to obtain the best agent performance. This paper robustly evaluates 30 different Reinforcement Learning reward functions for controlling intersections serving pedestrians and vehicles covering the main traffic state variables available via modern vision-based sensors. Some rewards proposed in previous literature solely for vehicular traffic are extended to pedestrians while new ones are introduced. We use a calibrated model in terms of demand, sensors, green times and other operational constraints of a real intersection in Greater Manchester, UK. The assessed rewards can be classified in 5 groups depending on the magnitudes used: queues, waiting time, delay, average speed and throughput in the junction. The performance of different agents, in terms of waiting time, is compared across different demand levels, from normal operation to saturation of traditional adaptive controllers. We find that those rewards maximising the speed of the network obtain the lowest waiting time for vehicles and pedestrians simultaneously, closely followed by queue minimisation, demonstrating better performance than other previously proposed methods.