 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAR Point&Click: An Interface for Setting Robot Navigation Goals
Paper and Code
Mar 29, 2022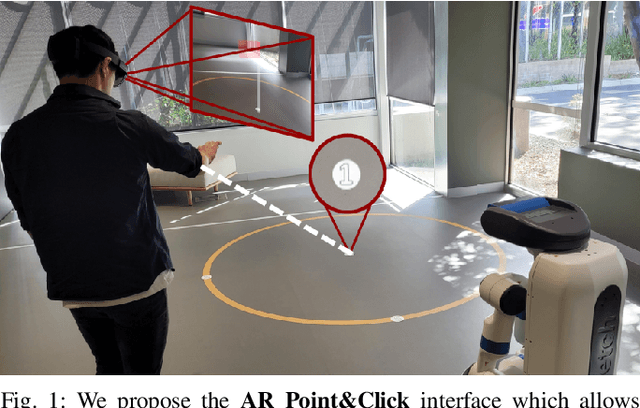
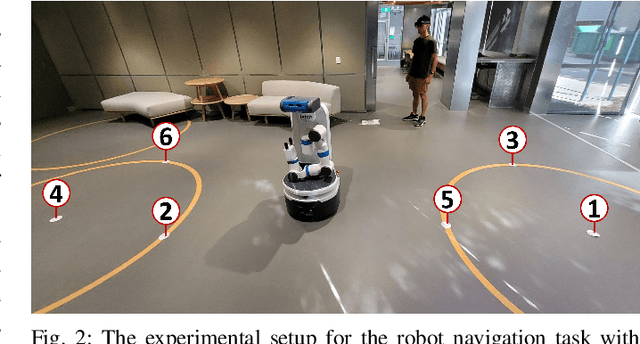
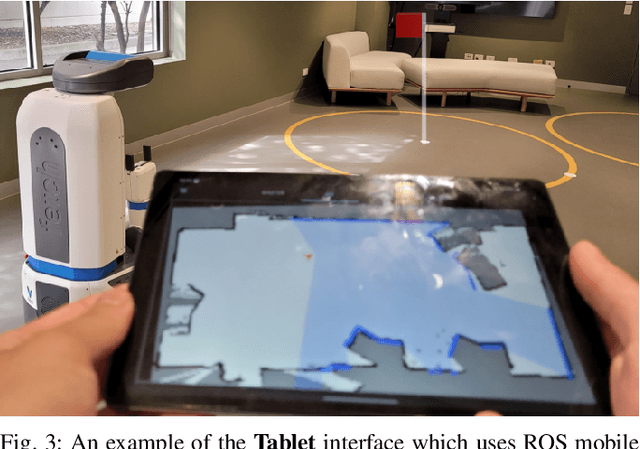
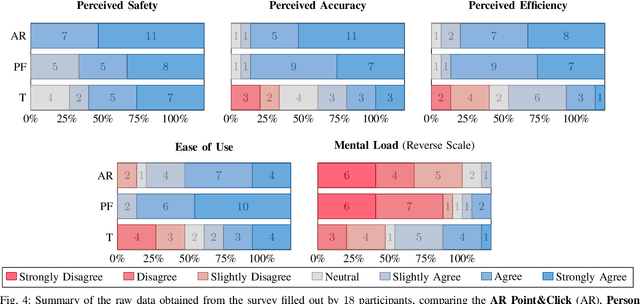
This paper considers the problem of designating navigation goal locations for interactive mobile robots. We propose a point-and-click interface, implemented with an Augmented Reality (AR) headset. The cameras on the AR headset are used to detect natural pointing gestures performed by the user. The selected goal is visualized through the AR headset, allowing the users to adjust the goal location if desired. We conduct a user study in which participants set consecutive navigation goals for the robot using three different interfaces: AR Point & Click, Person Following and Tablet (birdeye map view). Results show that the proposed AR Point&Click interface improved the perceived accuracy, efficiency and reduced mental load compared to the baseline tablet interface, and it performed on-par to the Person Following method. These results show that the AR Point\&Click is a feasible interaction model for setting navigation goals.